Intelligent robot grabbing device
An intelligent robot and grasping device technology, applied in the field of robotics, can solve the problems of high labor intensity, small grasping range, low grasping accuracy, etc., and achieves small occupied space, high clamping stability, and small action stroke. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0021] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
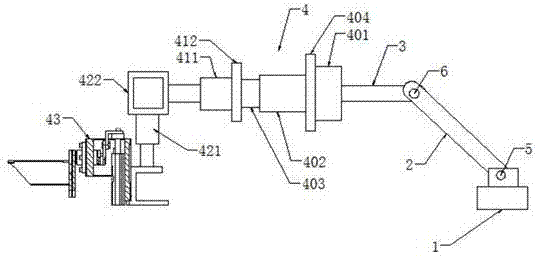
[0022] Such as Figure 1-2 As shown, it is an intelligent robot grasping device of the present invention, including a fixed base 1, a rear arm 2, a forearm 3, an execution terminal 4 and a PLC control cabinet 7; the rear arm 2 is connected with the fixed base 1 through a rotating motor A5; the forearm 3 Connect the rear arm 2 through the rotating motor B6; the forearm 3 is connected to the execution end 4; the PLC control cabinet 7 is connected to the rear arm 2, the forearm 3, the execution end 4, the rotation motor A5 and the rotation motor B6;
[0023] The execution terminal 4 includes a horizontal rotation mechanism, a lifting mechanism, a telescopic mechanism and a gripper mechanism 43; the horizontal rotation mechanism includes a driving motor 401, a shaft sleeve 402, a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com