

Method for controlling vehicle spacing in self-adapting variable-speed cruise process of vehicle
A control method and self-adaptive technology, applied to other vehicle parameters and other directions, can solve the problems of difficult implementation, complicated online calculation, abstract understanding, etc., and achieve the effect of simple online implementation, few adjustment parameters, and strong practicability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The method of the present invention will be described in further detail below in conjunction with the accompanying drawings.
[0032] refer to Figure 1 ~ Figure 3 , a vehicle adaptive variable speed cruising process inter-vehicle distance control method, the control method includes the following steps:
[0033] 1) Establish a third-order continuous-time dynamics model of the vehicle adaptive variable speed cruise process, see formula (1):
[0034]
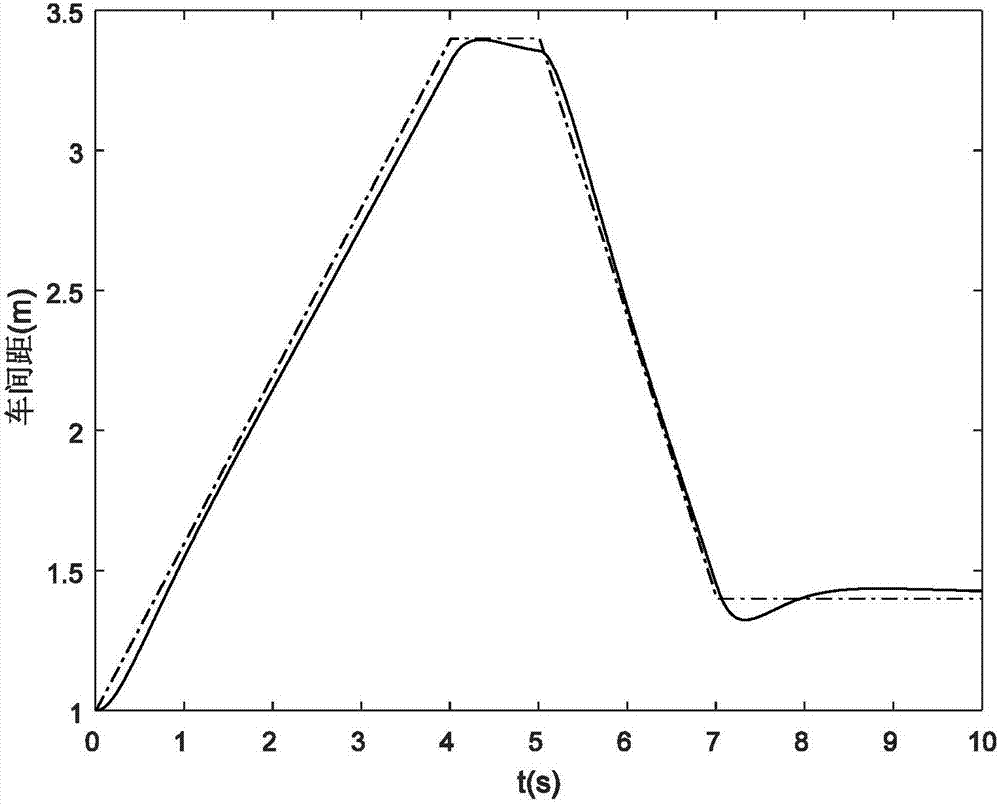
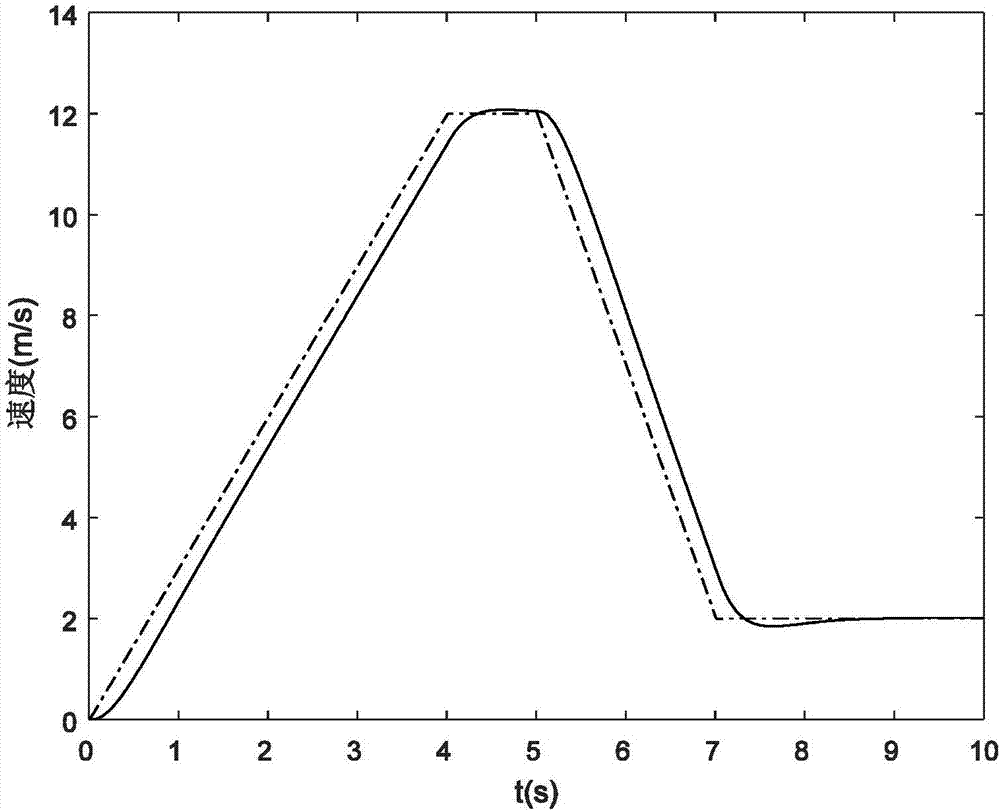
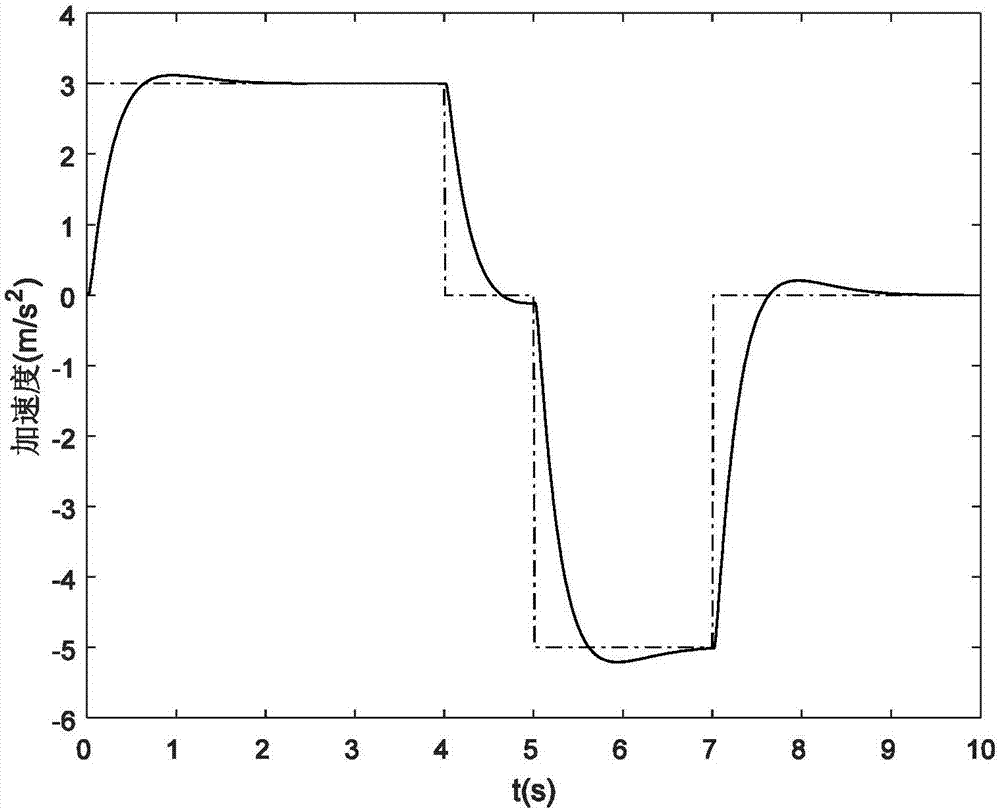
[0035] Among them, the variable t represents time; x 1 (t), x 2 (t) and x 3 (t) respectively represent the distance error between the vehicle in front and the vehicle at time t, the relative speed and the acceleration of the vehicle; u(t) represents the command acceleration of the vehicle at time t; w(t) represents the actual speed of the vehicle in front at time t Acceleration; parameters h and σ are headway and time constant respectively; considering model formula (1), define the state column vector x=[x 1 x 2 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More