

Probability hypothesis density filtering radar spatial error registering method under ECEF (earth-centered Earth-fixed coordinate) coordinate system
A probability hypothesis density and spatial error technology, applied in radio wave measurement systems, instruments, etc., can solve the problems such as the undiscovered probability hypothesis density filtering radar spatial error registration method and the unsatisfactory effect, so as to avoid data correlation processing and estimation. The effect of high accuracy and good estimation performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The following describes in detail the method for registration of spatial error of radar space error by probability hypothesis density filtering in the ECEF coordinate system provided by the present invention with reference to the accompanying drawings and specific embodiments.
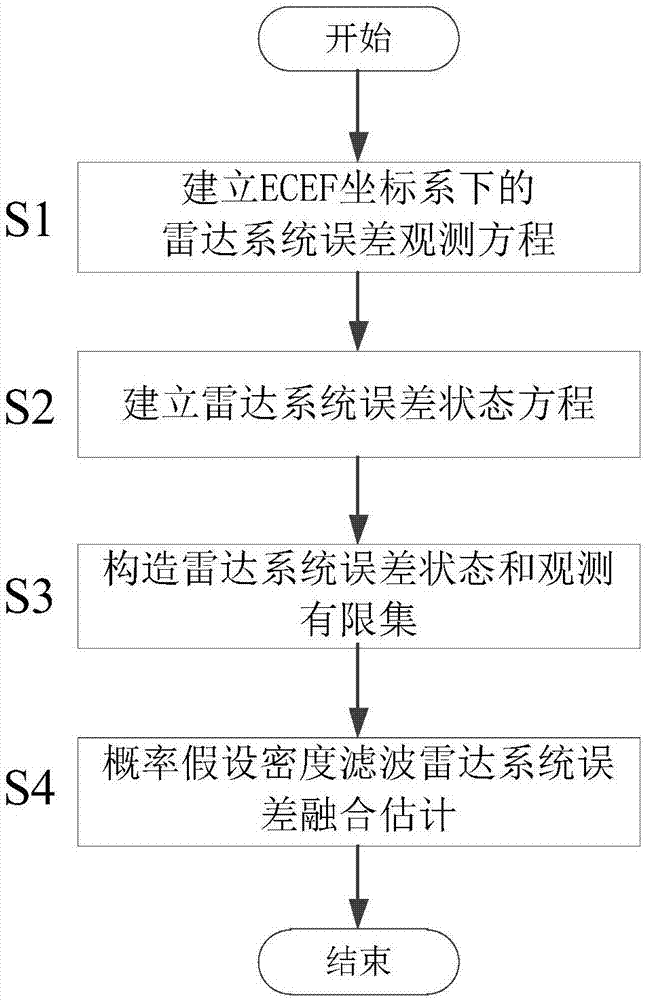
[0021] figure 1 It is a flow chart of the method for registration of spatial error of radar space error by probability hypothesis density filtering in the ECEF coordinate system provided by the present invention. All the operations are completed in the computer system, and the main body of the operation is the computer system.
[0022] Such as figure 1 As shown, the probability hypothesis density filtering radar spatial error registration method under the ECEF coordinate system provided by the present invention includes the following steps carried out in order:
[0023] 3) Establish the S1 stage of the radar system error observation equation under the ECEF coordinate system:
[0024] In this ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More