

A monocular vision vehicle distance measurement method using the Internet of Vehicles to obtain the characteristics of the vehicle in front
A technology of monocular vision and ranging method, which is applied in the field of vehicle ranging to achieve the effects of rapid estimation, improvement of estimation accuracy, and elimination of influences
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
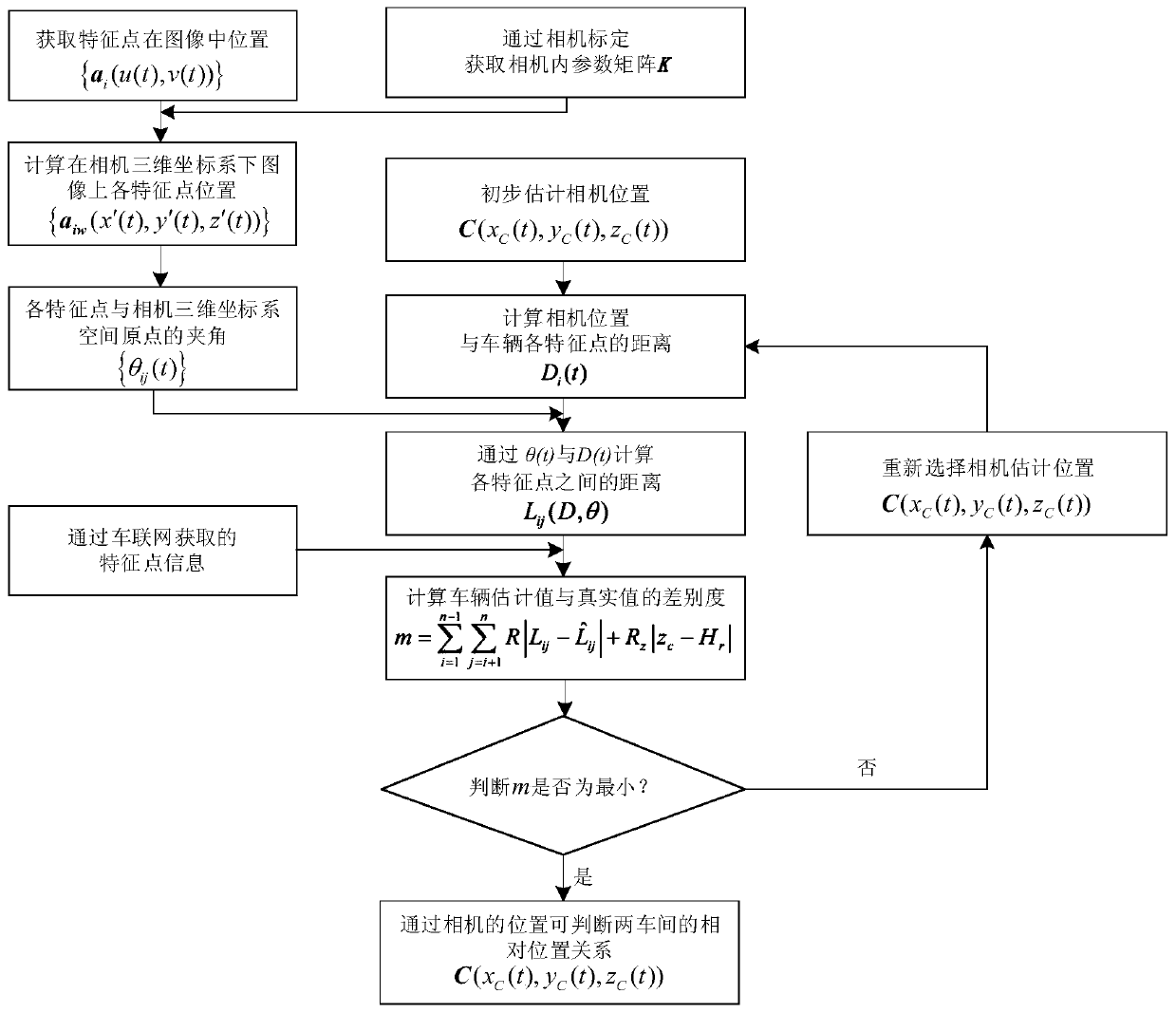
[0030] Such as figure 1 As shown, the present invention provides a monocular vision vehicle ranging method using the Internet of Vehicles to obtain the characteristics of the preceding vehicle, the method comprising the following steps:
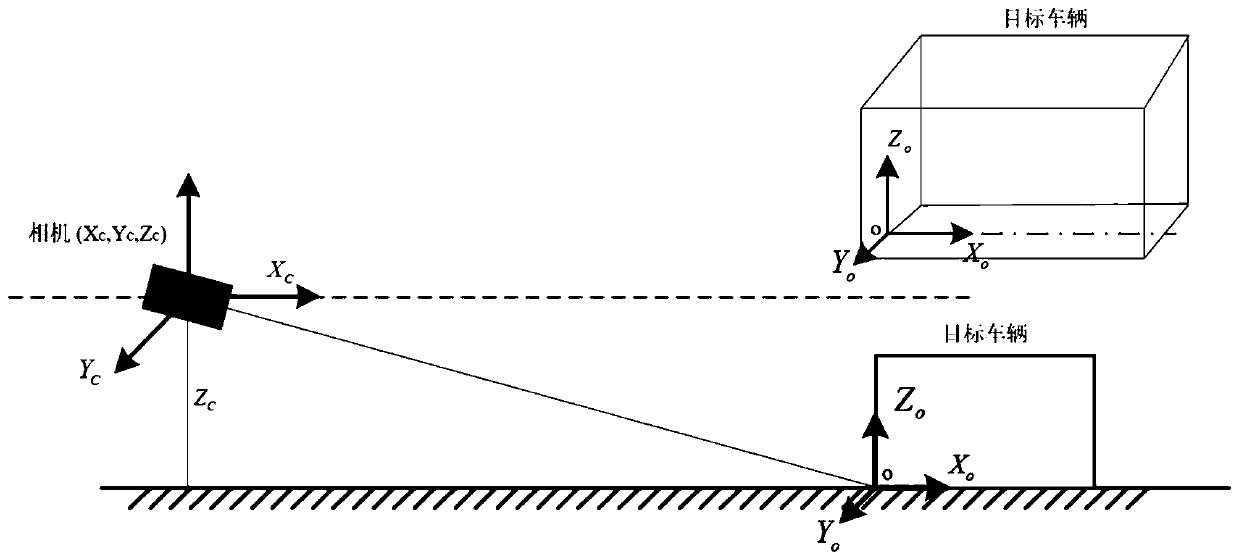
[0031] 1) Discover the target vehicle, obtain the Internet of Vehicles information of the target vehicle, and obtain the image information of the target vehicle through the camera. The camera is installed on the vehicle behind the target vehicle; the target vehicle is the front vehicle, and the vehicle with the camera is rear car;
[0032] 2) Obtain the spatial relationship information between the feature points of the preceding vehicle from the Internet of Vehicles information, use the spatial relationship information and the position of each feature point of the preceding vehicle in the image information to establ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More