

Automobile part welding optimal path planning method of multi-robot coordination
An optimal path planning, multi-robot technology, applied in two-dimensional position/channel control and other directions, can solve problems such as premature convergence, loss of diversity of particle swarms, and inability to obtain global optimal solutions, so as to improve welding speed and improve The effect of production efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
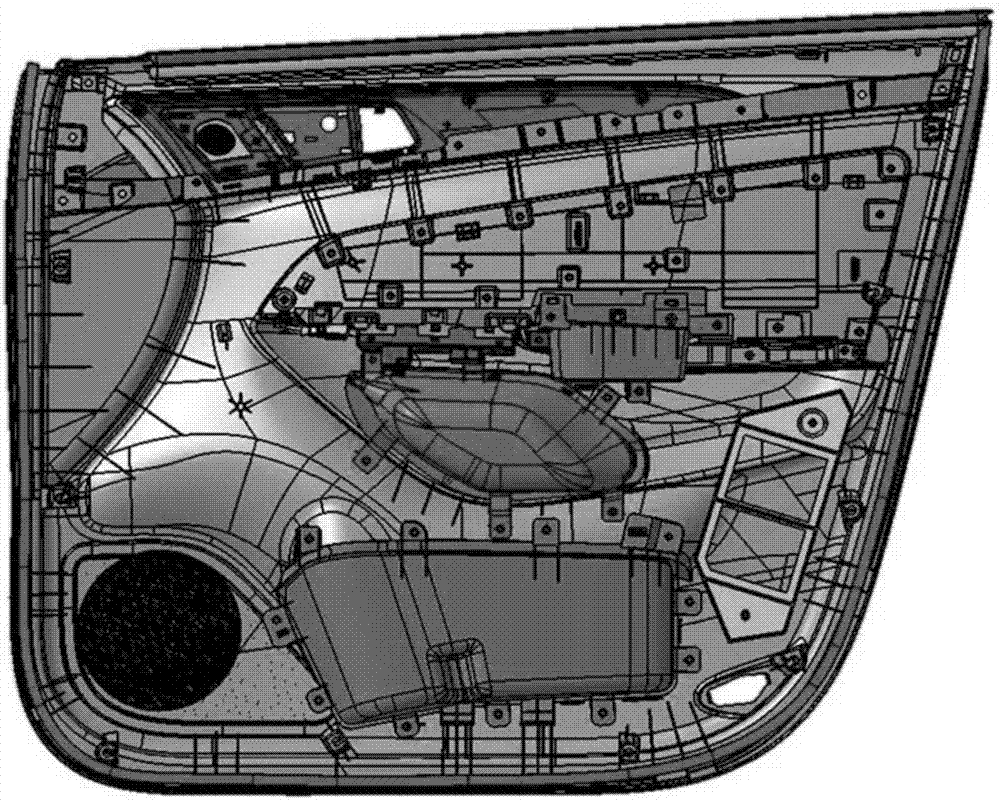
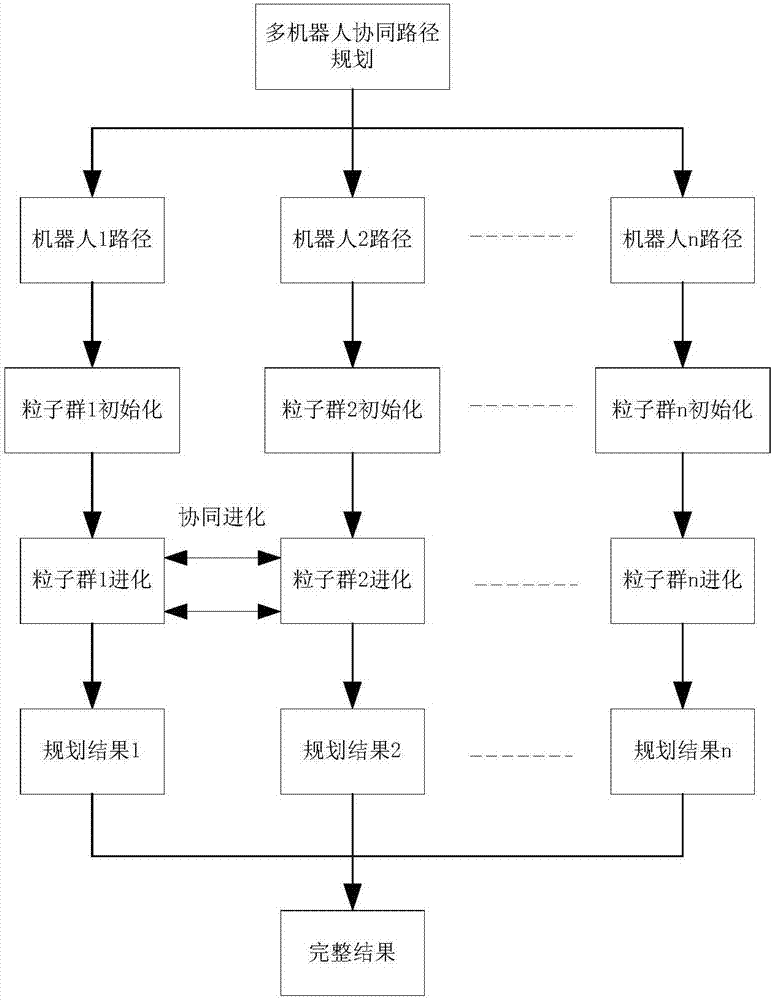
[0043] A multi-robot collaborative welding optimal path planning method for auto parts, the method can analyze the welding point information for different welding decorations, and calculate the corresponding welding path. The method specifically includes the following steps:
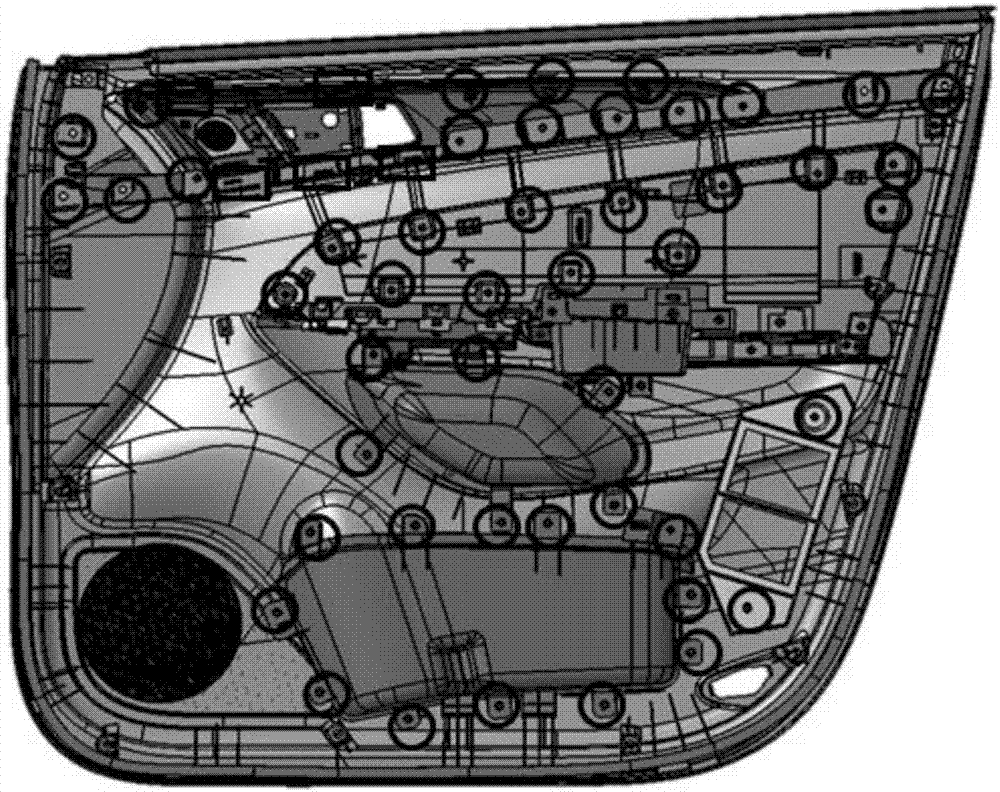
[0044] S1. The preprocessing step of solder joint information: first, use the visual image processing system to perform image recognition and feature extraction on the required solder joints, and compare with the preset solder joint information to obtain the number and distribution of solder joints.
[0045] In a specific application, the step S1 specifically includes:
[0046] S11. Corresponding to the original decorative parts, the number and position information of each original decorative part is known, and the number and position information of the detected welding points are compared with the original set number and position of the welding points through image processing technology The information...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More