

Autonomous operation robot chromatic aberration navigation control method
A control method and robot technology, applied in two-dimensional position/channel control, non-electric variable control, control/regulation system and other directions, can solve the problems of poor positioning accuracy, high cost of positioning operation, complex structure, etc., and achieve universal equipment. High type, reduce operation and maintenance costs, and control the effect of high progress
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
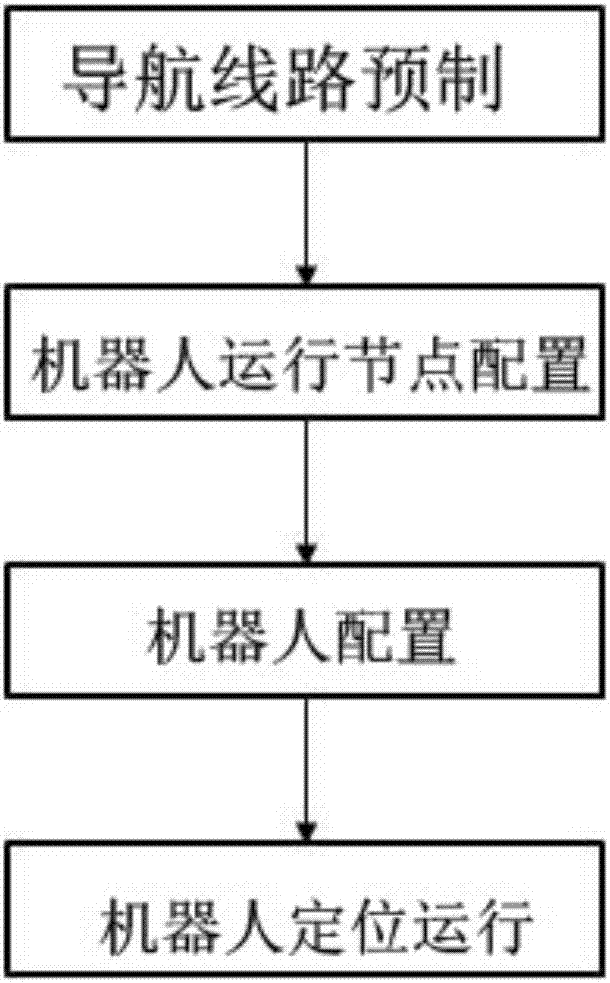
[0016] Such as figure 1 As shown, a color difference navigation control method for an autonomously operating robot includes the following steps:
[0017] The first step is to prefabricate the navigation route. According to the needs of the robot operation, first plan all the robot operation routes on the ground of the robot operation site, and then embed several multi-color lights in the site floor corresponding to each robot operation route, and Make the color of the multi-color lighting lamps in each running route the same, and the colors of the multi-color lighting lamps in different running routes are different. At the same time, in each running route, the distance between two adjacent multi-color lighting lamps is 10-50 cm; The distance between the multi-color lights between two running routes shall not be less than 20 cm, and the axes of each multi-color lights shall be vertically distributed to the floor of the site;
[0018] The second step is the robot running node c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More