

Universal base plate for heavy-load two-wheel differential robot
A robot and wheel difference technology, applied in the field of robots, can solve problems such as inability to overload, achieve smooth driving effect, improve versatility, and ensure the effect of driving force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to further understand the content of the invention, features and effects of the present invention, the following examples are given in detail as follows:
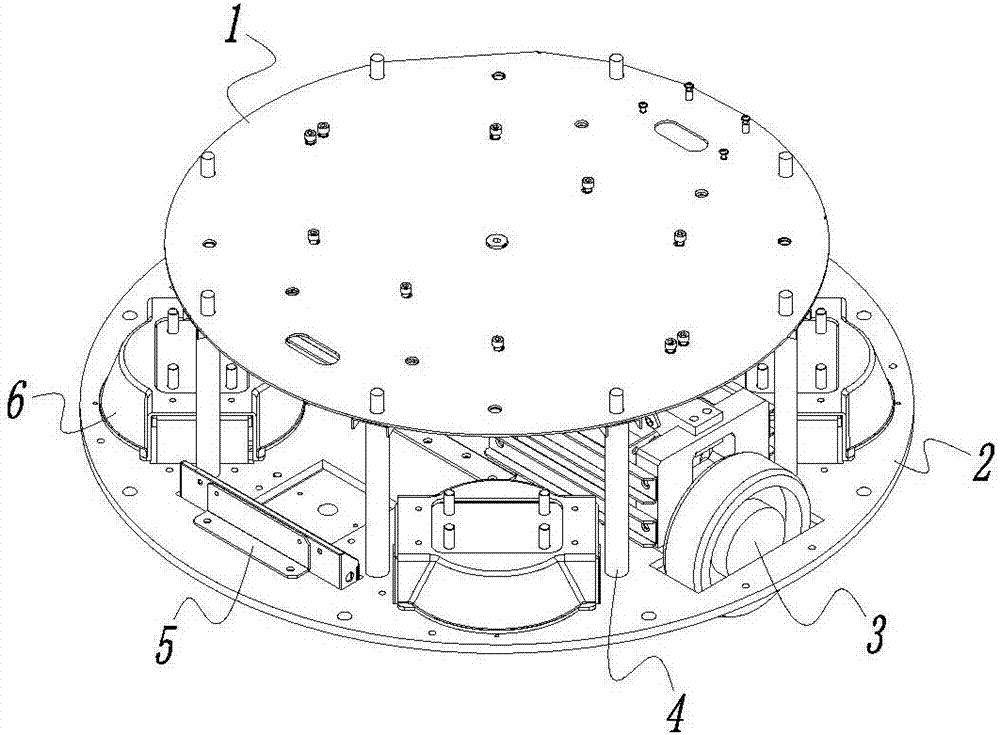
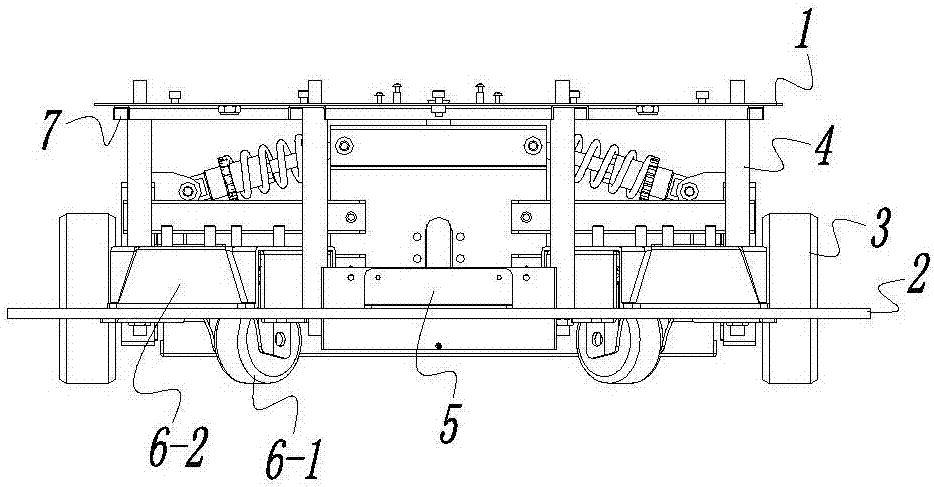
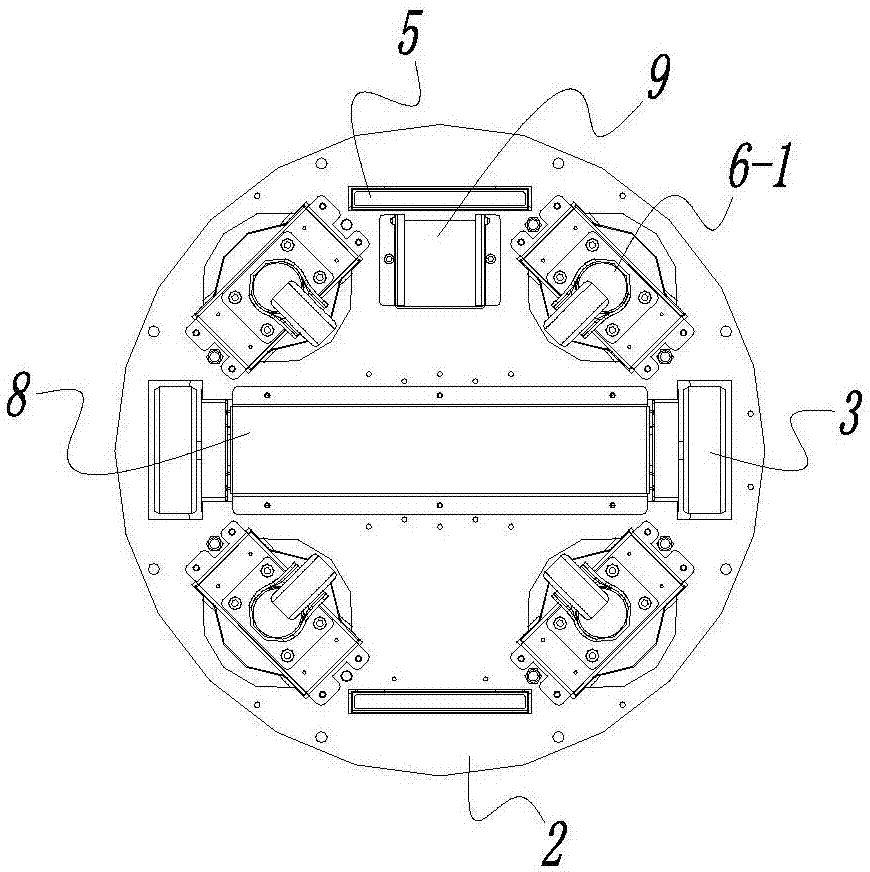
[0024] See Figure 1 to Figure 3 , the universal chassis of the heavy-duty two-wheel differential robot of the present invention includes a base plate 2, a driving device mounting hole is provided in the middle of the base plate 2 and a suspension driving device 3 is installed on the driving device mounting hole, on the base plate 2, A plurality of supporting wheel mounting holes are arranged around the driving device mounting holes and a supporting wheel device 6 is installed on each supporting wheel mounting hole. Wherein a plurality of supporting wheel devices 6 are used for loading, and all weights are jointly carried by each supporting wheel device 6, and the suspension driving device 3 is used for providing driving force, and separating driving and carrying helps to improve the load-bearing capacity of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More