Underwater robot control method taking regard of multi-body coupling
A technology of underwater robot and control method, applied in the direction of non-electric variable control, height or depth control, control/regulation system, etc., can solve the problems that the multi-body system dynamics cannot directly apply servo motors, and the control ability cannot meet the requirements, etc. , to achieve the effect of stable base, improved control effect and stable control platform
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0026] Take the tracking task of the end pose of the robotic arm by an underwater robot equipped with a six-degree-of-freedom robotic arm as an example.
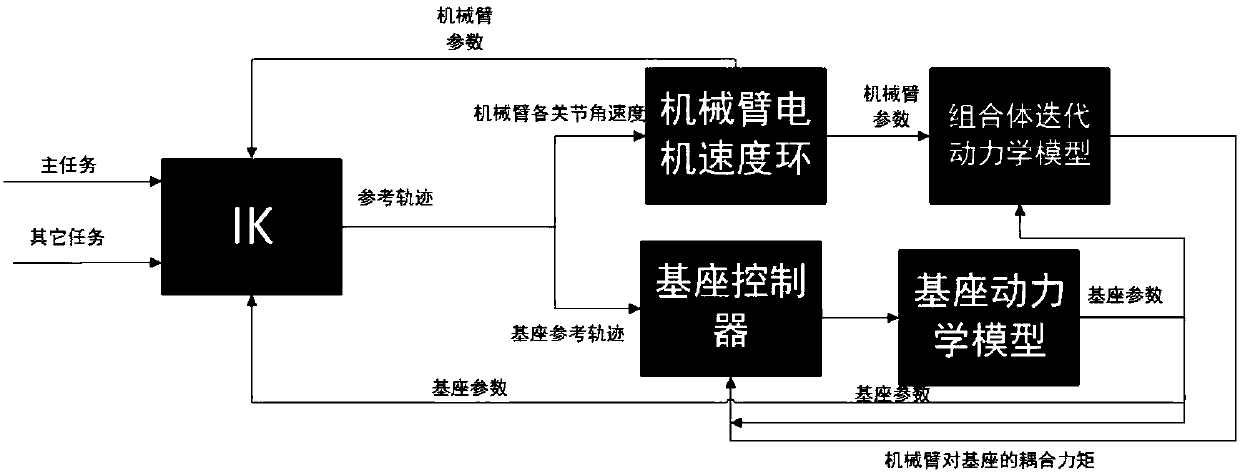
[0027] First, the kinematics control module IK calculates the reference trajectory of the base and the robotic arm according to the following formula:
[0028]
[0029] In formula (1.1), is the calculated reference trajectory, where the first six elements are the reference trajectory of the base, and the last six elements are the reference trajectory of the manipulator, and they are sent to the speed loop of the manipulator and the base controller respectively. Related to the pedestal Jacobian matrix, represents the linear velocity of the manipulator, ω ee Represents the angular velocity of the manipulator; K a is the error feedback coefficient; Represents the position and attitude error c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More