

An all-wheel steering unmanned platform driven by hub motors
A hub motor and unmanned platform technology, applied in the functional field, can solve problems such as narrow application range, poor maneuverability, and complex mechanical structure, and achieve the effects of reducing weight and volume, ensuring dynamic performance, and simplifying the mechanical transmission mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
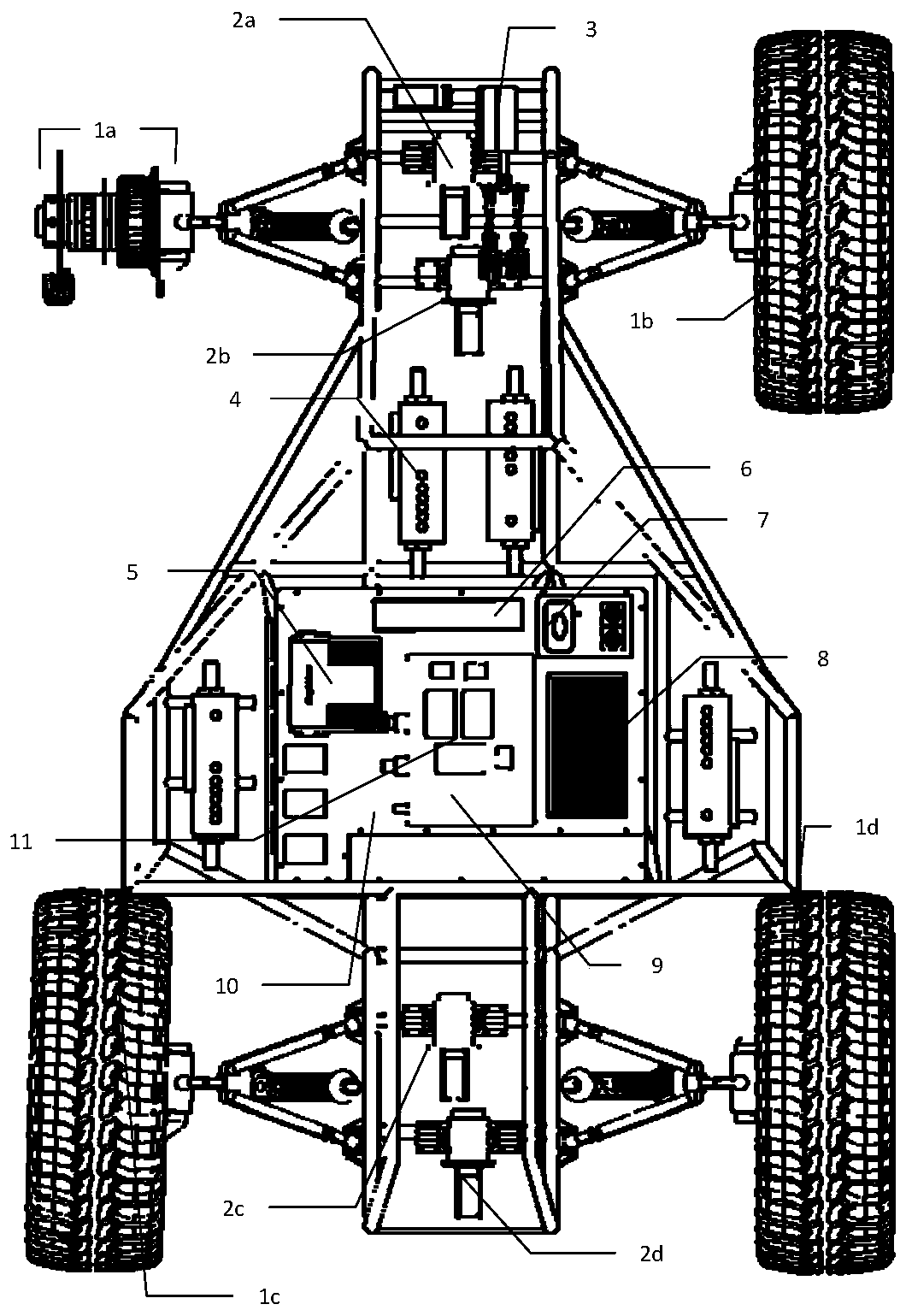
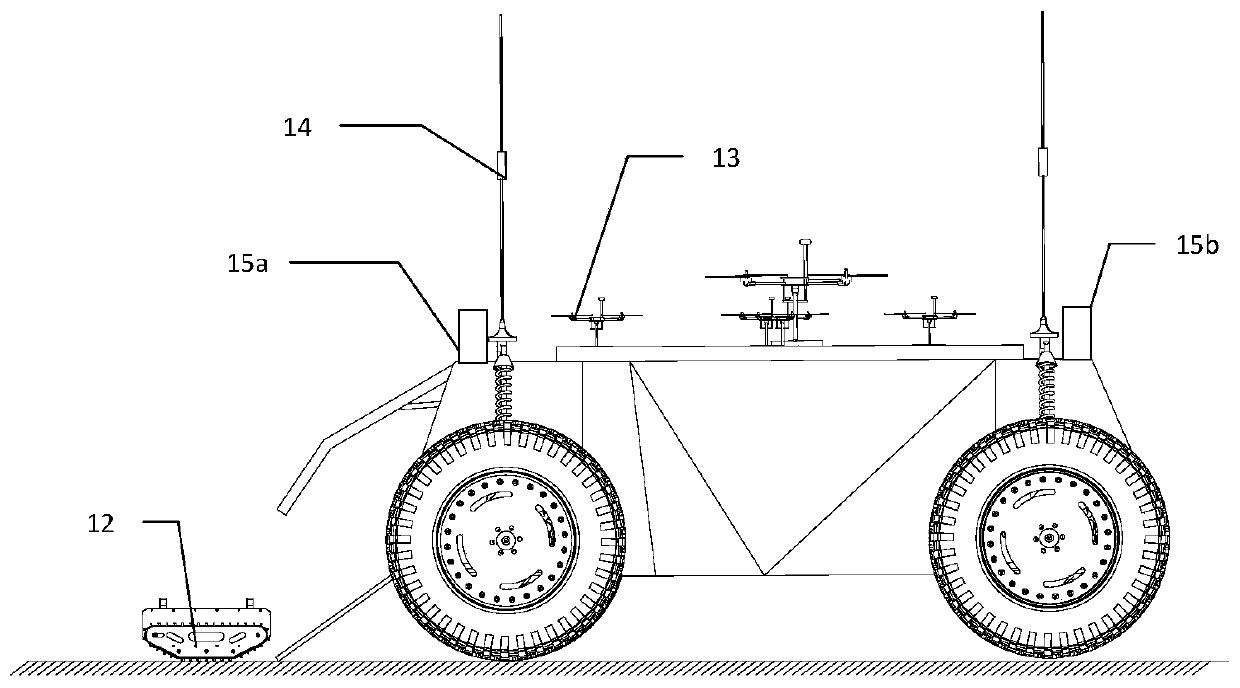
[0045] Such as figure 1 As shown, the present invention provides a pure electric all-wheel steering unmanned platform driven by a hub motor, equipped with all-wheel steering technology and equipped with a variety of reconnaissance robots. The platform includes a platform main body and a ground remote control station, wherein the platform main body It also includes an image acquisition module, a platform main body controller 5, a tire steering mechanism, a land reconnaissance robot 12, an air reconnaissance robot 13 and a power supply module. in:
[0046] The image acquisition module takes pictures of the surrounding environment, forms an image signal, and sends it to the ground remote control station through wireless means;
[0047] The ground remote control station sends a motion control command to the platform main controller, receives th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More