

Adaptive dynamics coordination control method of space manipulator
A space manipulator, adaptive control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
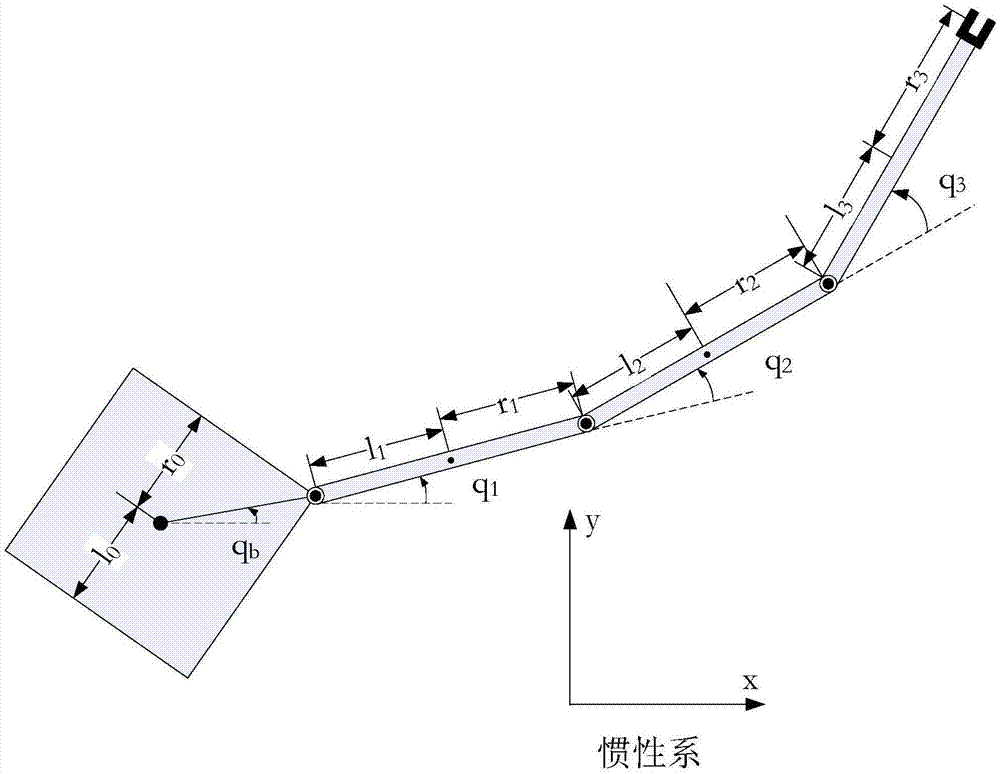
[0044] Such as figure 1 As shown, the free-floating space manipulator system based on the three-degree-of-freedom planar configuration verifies the adaptive dynamics coordination control algorithm disclosed in the present invention. The mechanical arm adopts a series structure and can only move in a plane. The base spacecraft can move in translation in the plane, and can also rotate around the axis perpendicular to the plane. The attitude and orbit control system of the pedestal spacecraft is turned off. When the system parameters are unknown, the control torque of the manipulator joints and the parameter adaptive law are designed to simultaneously achieve the purpose of attitude adjustment of the base spacecraft and trajectory tracking of the end of the manipulator.
[0045] The invention discloses a space manipulator adaptive dynamics coordination control method, the steps are as follows:
[0046] 1) Establish the extended kinematics model of the space manipulator;
[0047...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More