

A monitoring system and method for automatically retracting and unwinding cable for rov umbilical cable winch
A technology for automatic retraction and release of umbilical cables, applied in control/adjustment systems, non-electric variable control, clockwork mechanisms, etc., can solve the problems of inability to recover ROV and umbilical cables normally, high operating intensity and strong subjectivity, etc. Achieve the effect of ensuring navigation maneuver performance and operation energy efficiency, avoiding personnel misjudgment and misoperation, and avoiding too long or too short ropes.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
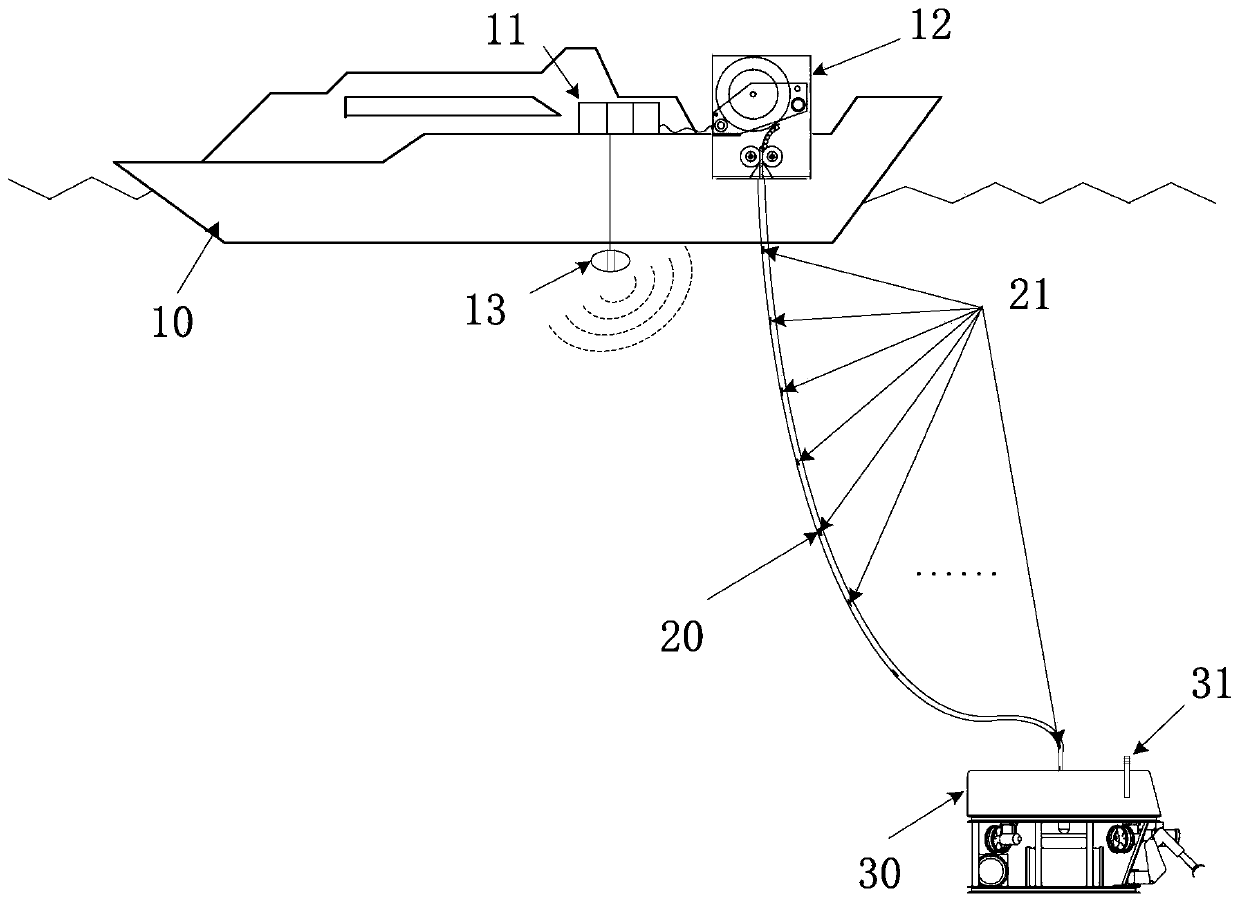
[0050] This application discloses an automatic cable monitoring system for ROV umbilical cable winch, please refer to figure 1 The system diagram shown, the system includes a surface mother ship 10, a console 11, an ROV umbilical cable winch 12, a sound source 13, an umbilical cable 20, an optical fiber hydrophone 21, and ROV (Remotely Operated Vehicle, unmanned cable control submersible) 30 and hydroacoustic beacons 31 .
[0051] The console 11 , the ROV umbilical winch 12 and the sound source 13 are arranged on the surface mother vessel 10 . The console 11 is usually set in the cabin of the surface mother ship 10 for monitoring and controlling the entire system. The console 11 includes an industrial computer, a display, manipulation input devices, and signal acquisition and processing boards. The ROV umbilical winch 12 includes a drum on...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More