

An industrial double delta parallel robot structure and control system
A robot and industrial technology, applied in the field of dual Delta parallel robot mechanism and control system, can solve the problems of high cost, low efficiency, small working space, etc., and achieve the effect of strong operation adaptability and wide adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
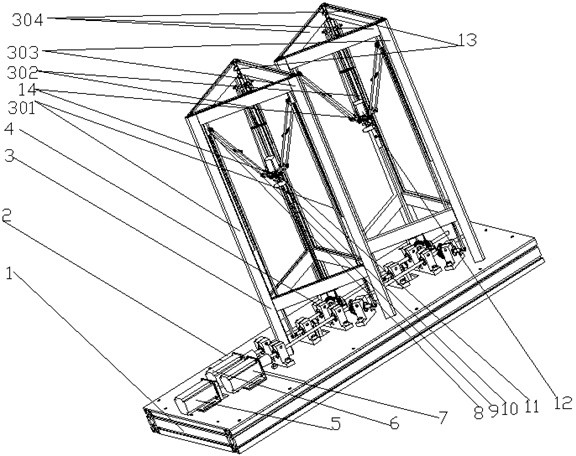
[0024] An industrial dual-Delta parallel robot structure and control system uses two Delta parallel robots connected in series to complete the same work simultaneously under the action of the STC single-chip microcomputer control system to improve the working efficiency of the system.
[0025] combine figure 1 , an industrial double Delta parallel robot structure and control system, mainly composed of aluminum profile base (1) and support base plate (2), aluminum profile frame (3), bearing and bearing seat (4), first kinematic chain ( 5), the second kinematic chain (6), the third kinematic chain (7), the guide rail slider assembly (8), the fisheye ball head bearing assembly (9), the parallel arm lever (10), the actuator fixing part (11) , actuator (12), limit switch (13), photoelectric switch (14), and control system.
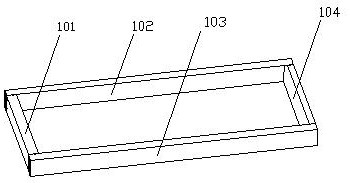
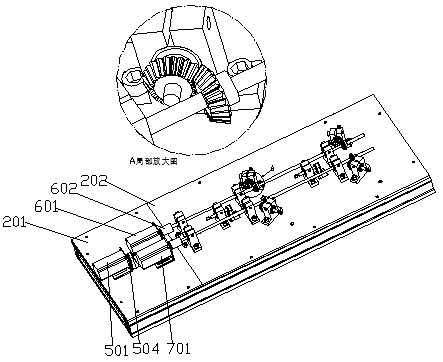
[0026] combine figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 , Figure 7 , an industrial dual-Delta parallel robot structure and control syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More