

Unmanned aerial vehicle control method
A control method and technology for drones, applied in the field of drones, can solve problems such as inconvenient operation and poor user experience, and achieve the effects of convenient operation, improved control methods, and good experience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0050] Please refer to figure 1 , Embodiment 1 of the present invention is:
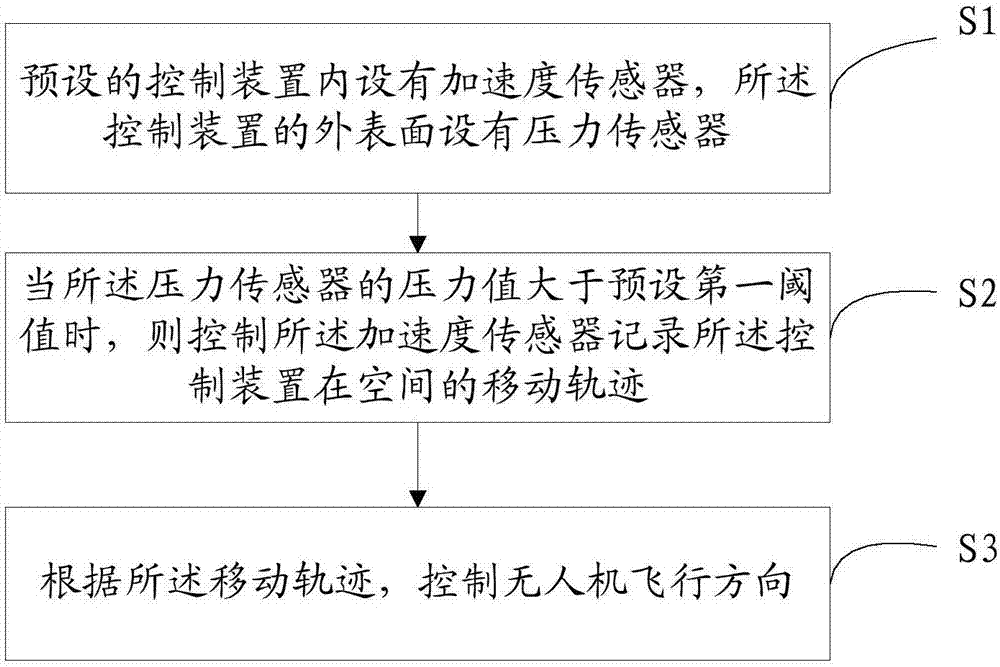
[0051] A method for controlling an unmanned aerial vehicle provided by the present invention comprises the following steps:
[0052] S1: The preset control device is provided with an acceleration sensor, and the outer surface of the control device is provided with a pressure sensor;
[0053] S2: When the pressure value of the pressure sensor is greater than a preset first threshold, control the acceleration sensor to record the movement trajectory of the control device in space;
[0054] S3: Control the flight direction of the UAV according to the movement trajectory.
[0055] In step S2, control the acceleration sensor to record the movement trajectory of the control device in space, and record the acceleration corresponding to each point on the movement trajectory;
[0056] The S3 is specifically:
[0057] According to the trajectory of the movement and the acceleration corresponding to each po...
Embodiment 2
[0059] The difference between Embodiment 2 and Embodiment 1 is that a method for controlling an unmanned aerial vehicle further includes:
[0060] A vibrator is provided in the control device, and an indicator light is provided on the control device;
[0061] Real-time detection of whether there is a fault problem in the UAV, if there is, then control the vibration of the vibrator, and at the same time switch the display color of the indicator light to red and flash at a certain frequency;
[0062] If the obtained pressure value of the pressure sensor is less than the preset second threshold, the control device is switched to a standby state;
[0063] When the pressure value of the pressure sensor is greater than the preset first threshold, the indicator light is controlled to emit light in a preset color;
[0064] When the pressure value of the pressure sensor is less than the preset second threshold, the indicator light is turned off;
[0065] The movement track of the con...
Embodiment 3
[0067] The difference between Embodiment 2 and Embodiment 1 is that a method for controlling an unmanned aerial vehicle further includes:
[0068] The preset mobile terminal respectively establishes a wireless communication connection with the control device and the drone;
[0069] controlling the mobile terminal to obtain the movement trajectory of the control device every preset second time period;
[0070] Sending the movement track to the UAV through the mobile terminal, so as to control the flight direction of the UAV.
[0071] "Send the movement trajectory to the UAV through the mobile terminal to control the flight direction of the UAV" specifically:
[0072] The mobile terminal generates a corresponding modulation signal through a preset synchronization sequence and the movement trajectory;
[0073] sending the modulated signal to the drone;
[0074] The unmanned aerial vehicle obtains the synchronization sequence and the movement trajectory through differential coh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More