

Quad-rotor indoor navigation method based on combination of vision and inertia
An indoor navigation and inertial combination technology, applied in the field of indoor navigation, can solve the problem of lack of scale information in navigation position information, and achieve the effect of improving navigation accuracy, accuracy and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0023] The quadrotor indoor navigation method based on the combination of vision and inertia of the present invention will be described in detail below with reference to the embodiments and the accompanying drawings.
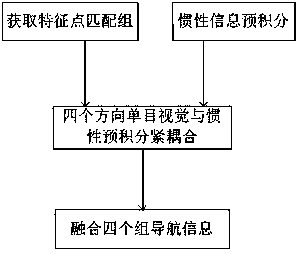
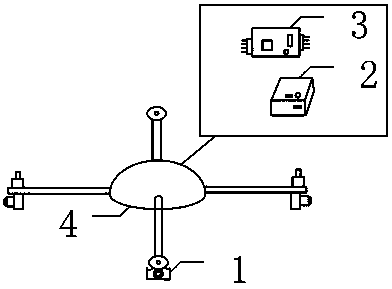
[0024] In the absence of external navigation information indoors, relying on the combination of cameras and inertial components installed on the quadrotor to provide navigation information; the present invention designs a quadrotor indoor navigation method based on the combination of vision and inertia, including the following steps: First, extract and Match the four cameras under the quadrotor motor base to collect image feature points in four directions synchronously, obtain the matching group of feature points, and pre-integrate the inertial information of the quadrotor between adjacent image frames; The visual and inertial pre-integration information is tightly coupled to obtain four sets of quadrotor navigation information; finally, the four sets of navigati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More