

Control system and method for functional brain deep electric stimulation
A deep brain stimulation and functional electrical stimulation technology, applied in electrotherapy, artificial respiration, physical therapy, etc., can solve the problem of inability to achieve rehabilitation control, insufficient scalp EEG signals to determine the disease state, no obvious characteristics of EMG, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
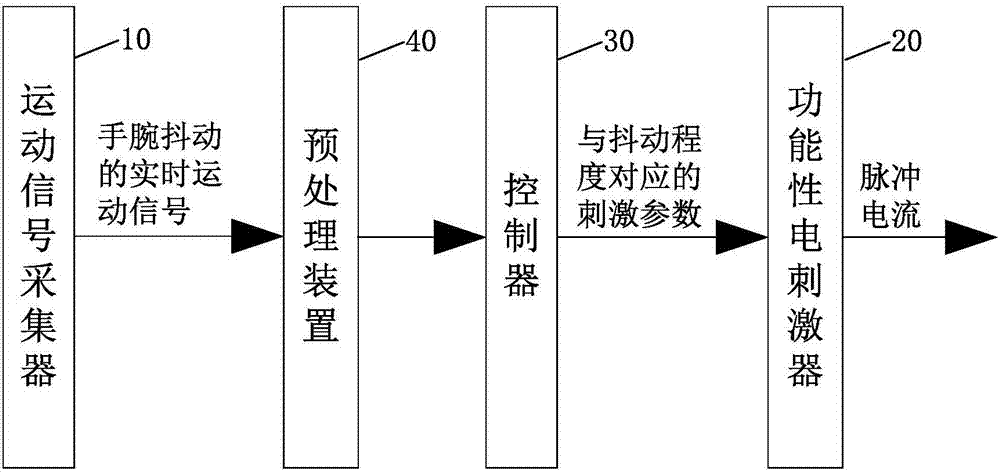
[0031] Such as figure 1 As shown, the embodiment of the present invention provides a functional deep brain stimulation control system, which includes a motion signal collector 10 , a functional electrical stimulator 20 and a controller 30 . The motion signal collector 10 is used to collect real-time motion signals of wrist shaking, and the functional electrical stimulator 20 generates pulse current for stimulation. The controller 30 is communicatively connected to the motion signal collector 10 and the functional electrical stimulator 20, respectively. The controller 30 pre-stores the shaking degree levels and the stimulation parameters corresponding to each shaking degree level, and the shaking degree levels and the stimulation parameters corresponding to each shaking degree level are preferably in the form of a scale for query. The controller 30 receives the real-time motion signal collected by the motion signal collector 10 and judges whether it belongs to the degree of sh...
Embodiment 2
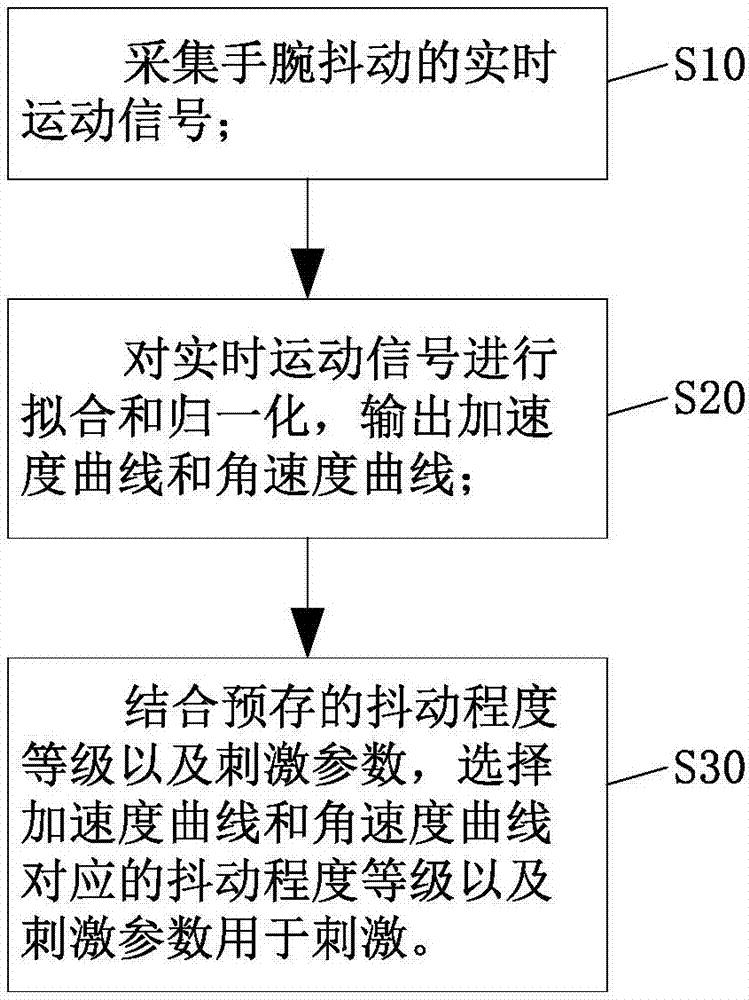
[0039] On the basis of the functional deep brain stimulation control system provided in Example 1, the embodiment of the present invention provides a functional deep brain stimulation control method, such as figure 2 As shown, it includes the following steps:
[0040] S10, collecting real-time motion signals of wrist shaking;
[0041] S20, fitting and normalizing the real-time motion signal, and outputting an acceleration curve and an angular velocity curve;
[0042] S30, combining the pre-stored shaking degree levels and stimulation parameters, selecting the shaking degree levels and stimulation parameters corresponding to the acceleration curve and the angular velocity curve for stimulation.
[0043]In the above embodiment, in step S10, it is preferable to use a watch worn on the wrist to collect real-time motion signals of wrist shaking. The real-time motion signals include three acceleration signals and three angular velocity signals in three-dimensional directions. In ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More