

Light humanoid five-fingered dexterous hand mechanism
A dexterous hand and five-finger technology, applied in manipulators, chucks, manufacturing tools, etc., can solve the problems of reduced motor power density ratio, complexity, and reduced safety, and achieve reduced manufacturing costs, high transmission efficiency, and low manufacturing costs. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments.
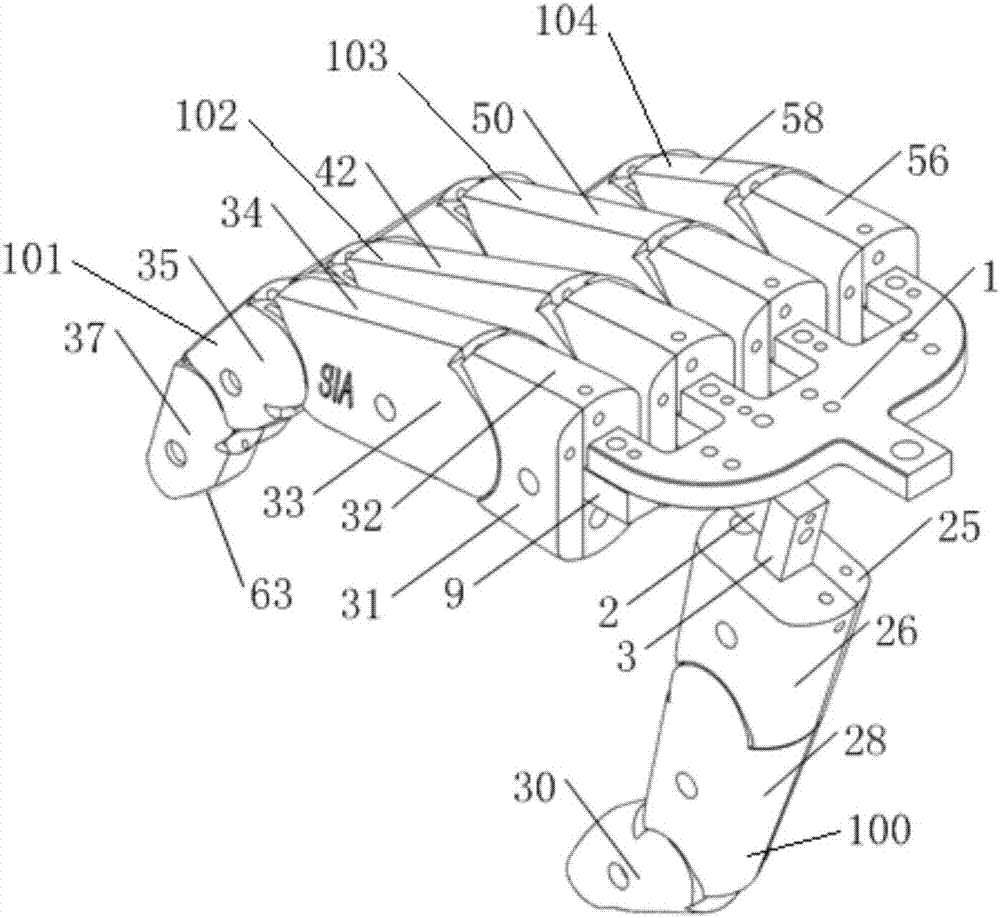
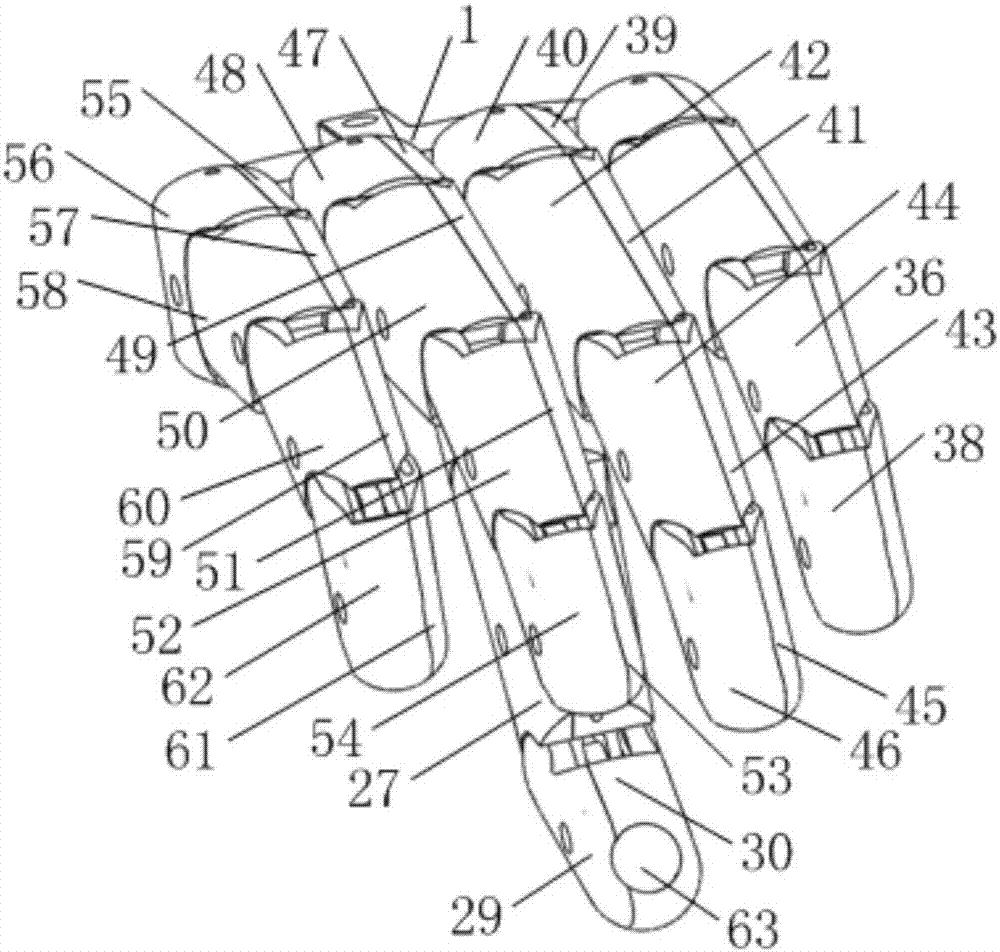
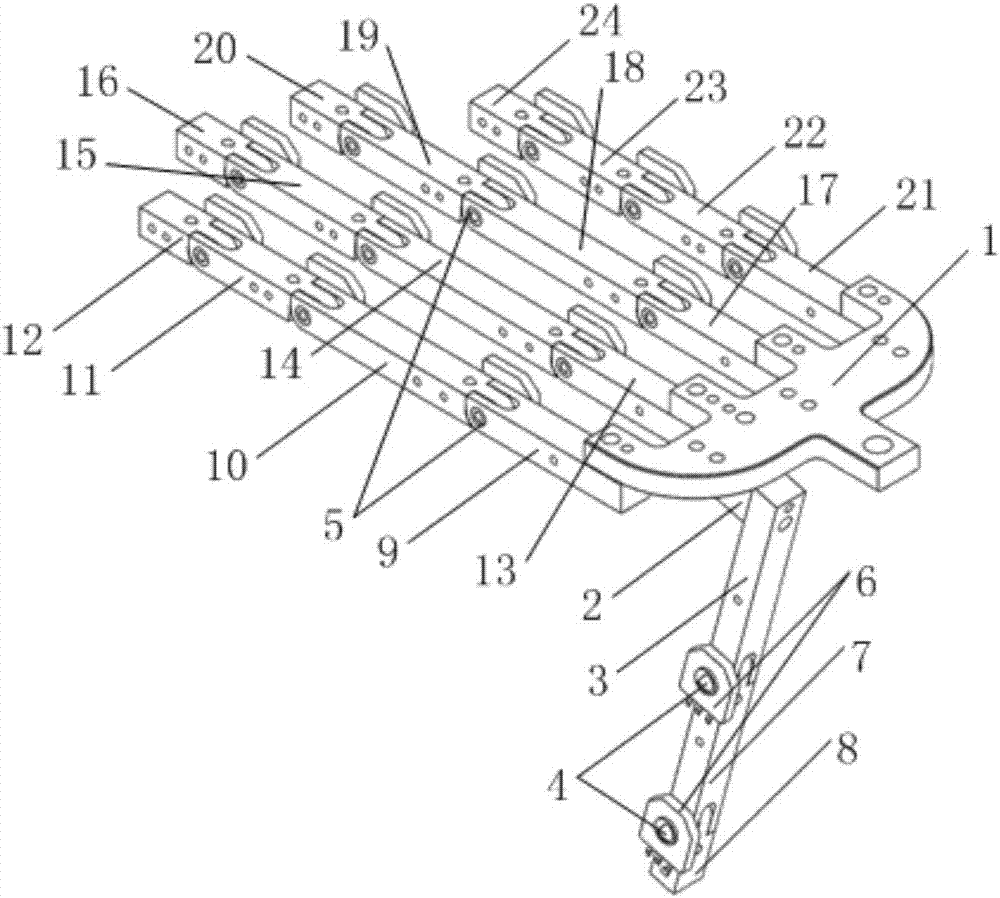
[0025] like figure 1 , figure 2 As shown, the present invention provides a lightweight humanoid five-finger dexterous hand mechanism, including a palm 1, a thumb mount 2, a thumb 100, an index finger 101, a middle finger 102, a ring finger 103 and a little finger 104, wherein the thumb 100 passes through the thumb mount 2 To be installed on the palm 1 , the index finger 101 , the middle finger 102 , the ring finger 103 and the little finger 104 are directly installed on the palm 1 in sequence. The thumb 100 includes two joints and has two degrees of freedom. The index finger 101 , the middle finger 102 , the ring finger 103 and the little finger 104 all include three joints with three degrees of freedom. The thumb 100 , the index finger 101 ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More