

Auxiliary device and method for industrial robot hand-held demonstration
A technology of industrial robots and auxiliary devices, applied in the program control and electrical program control of sequence/logic controllers, etc., can solve problems such as difficulty in obtaining uniform teaching points, difficulty in teaching, and difficulty in realizing motion trajectories.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
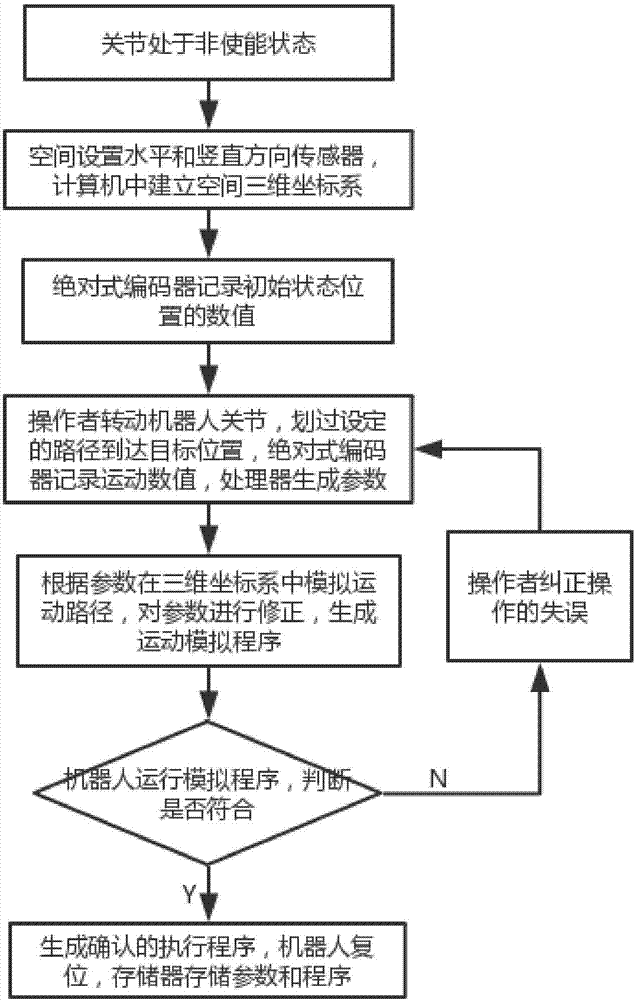
[0039] Example 1: Such as figure 2 As shown in the flowchart, the present invention provides an auxiliary method for teaching an industrial robot hand, which includes the following steps:
[0040] The joints of the industrial robot are in the disabled state, which means that the drive motors of the joints are turned off, or the torque is reduced, so that the joints are in a state that is easy to rotate by humans;
[0041] Set horizontal and vertical sensors in the space to capture the initial position information of the industrial robot, and establish a spatial three-dimensional coordinate system in the computer;
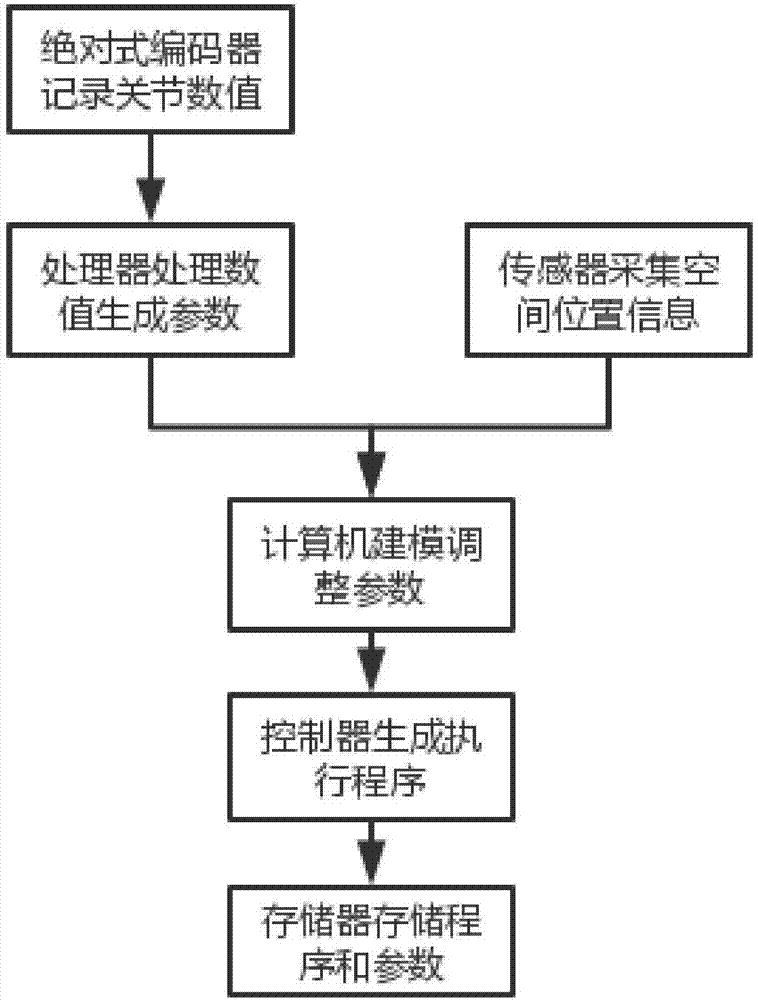
[0042] An absolute encoder is set at the joint to record the value of the initial state of the joint;
[0043] The operator rotates the joint, traverses the set path, and reaches the target position. During the rotation of the joint, the absolute encoder records the value of the joint rotation. There are multiple engravings on the optical code disc of the absolute encoder....
Embodiment 2
[0053] Some standard data are pre-stored in the memory, and a standard library of programs is established. When the industrial robot needs to move next time, or when a beginner needs to be instructed, the standard program is called from the memory to make the industrial robot run according to the established program. Interference appears). At the same time, each joint part can be moved separately, which is convenient for the operator to learn. It also assists the parameter indication and modification range while running, which is convenient for beginners to get started faster.
[0054] When the operator manually adjusts the industrial robot, in addition to the problem of insufficient accuracy, there is also the problem of not being able to optimize the robot's movement path, especially for some complex curves and multi-station operation. Each movement requires the instructor to make a comparison by himself. It is troublesome, so the demonstration to the operator through the standa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More