

Robot joint DC servo control system based on PLC
A robot joint and DC servo technology, applied in the direction of electrical program control, sequence/logic controller program control, etc., can solve the problems of complex circuit structure, cumbersome program, inconvenient operation, etc., and achieve strong expansion ability and avoid inertia Easy to rotate and maintain
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
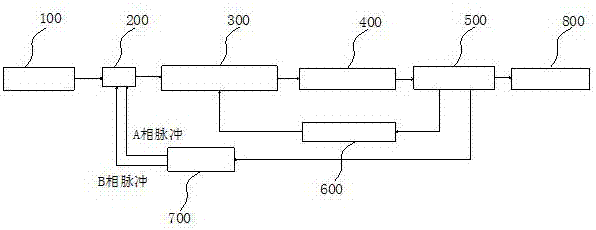
[0018] see Figure 1-2 , a PLC-based DC servo control system for robot joints, including a PLC editor 100, a PLC processor 200, a D / A digital-to-analog conversion module 300, a variable current speed control device 400, a DC motor 500, a tachogenerator set 600, a photoelectric Code disc 700, robot joint 800, the PLC editor 100 is connected to the PLC processor 200, and the PLC processor 200 is connected to the variable current speed regulating device 400 throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More