

Monocular vision obstacle avoidance method based on deep learning
A technology of monocular vision and deep learning, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as low efficiency and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
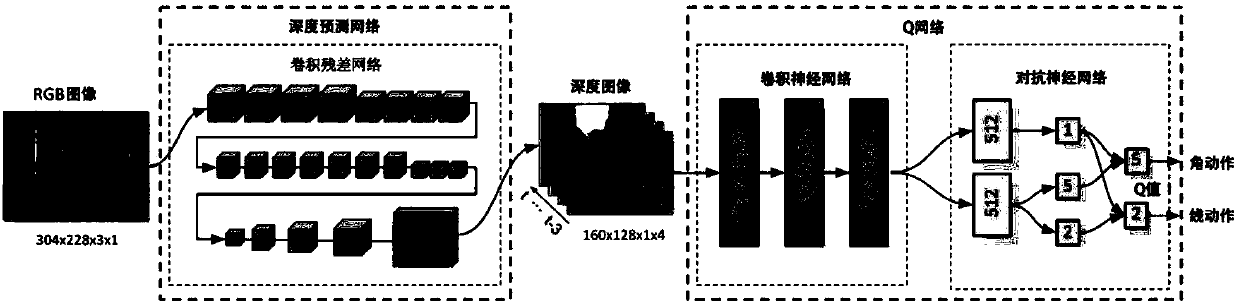
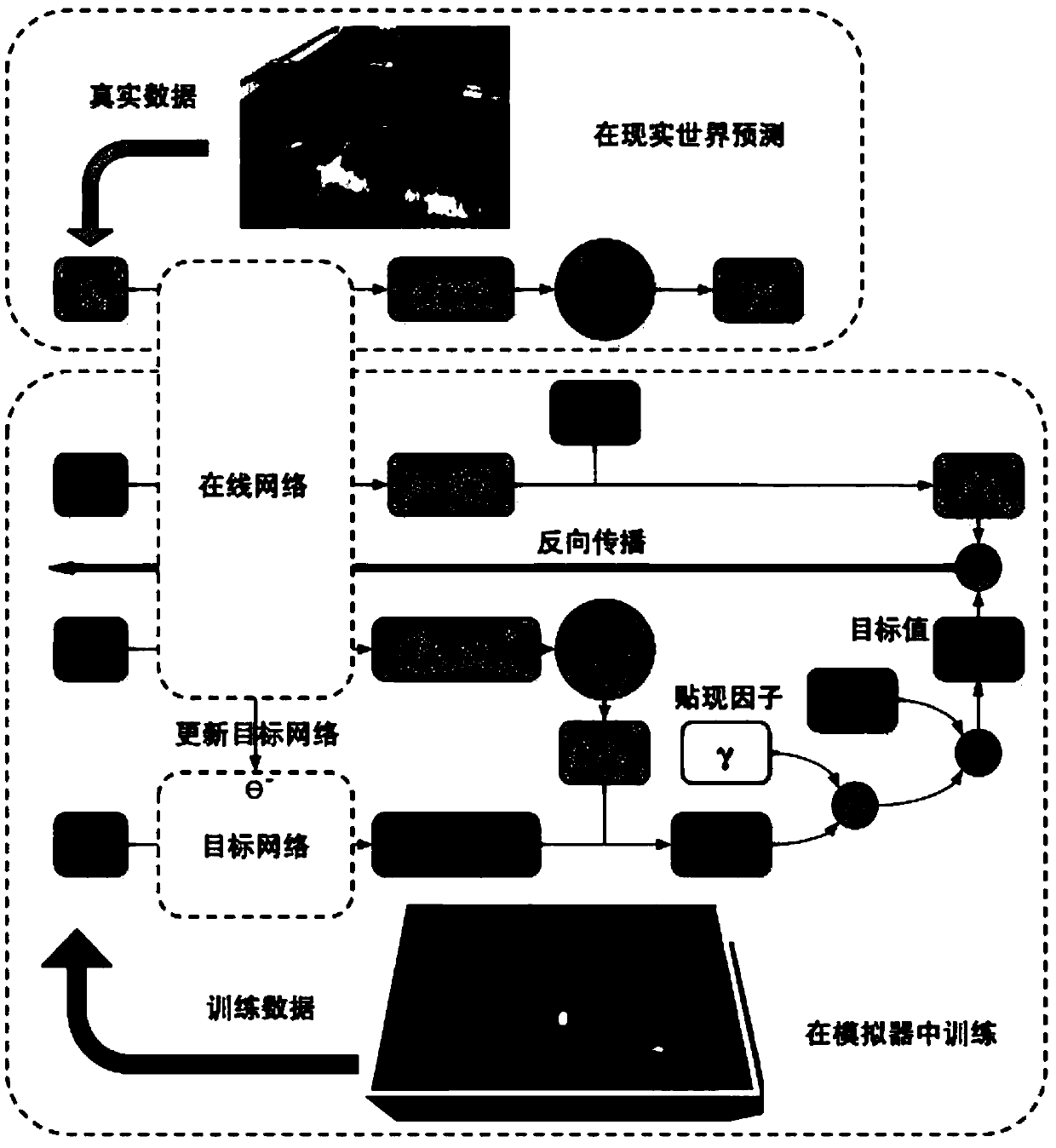
[0030] figure 1 It is a system frame diagram of a monocular vision obstacle avoidance method based on deep learning in the present invention. It mainly includes the definition of monocular visual obstacle avoidance; biphasic deep neural network; transformation from appearance to geometry; model setting.
[0031] Based on the definition of the monocular vision obstacle avoidance problem described in claim 1, the monocular vision obstacle avoidance problem can be regarded as the decision-making process of the interaction between the robot monocular camera and the environment, and the robot can use the camera image x t Choose an action on the time horizon t ∈ [0, T] Observe the reward ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More