

Quick replacement device for end effectors of double-arm collaborative robot and control system thereof
A technology of end effectors and actuators, applied in the direction of manipulators, manufacturing tools, chucks, etc., can solve problems such as inability to quickly replace, robot grasping or completion of motion restrictions, etc., to achieve fast connection and prevent placement errors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the drawings in the embodiments of the present invention.
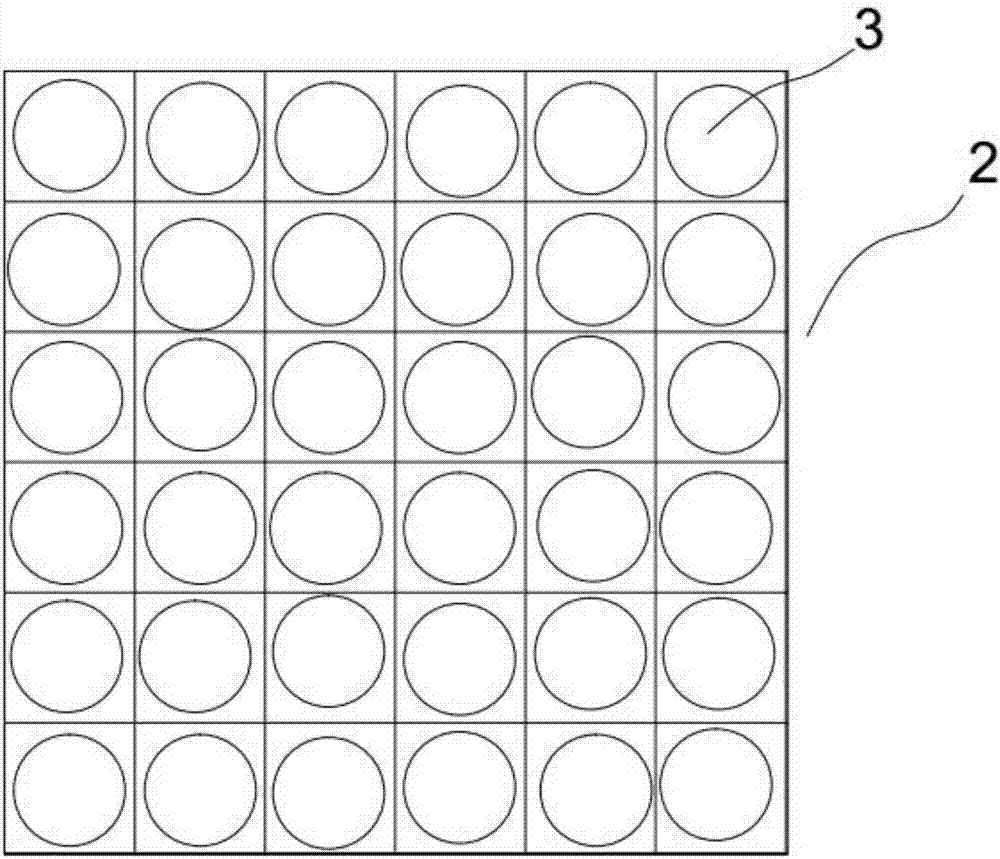
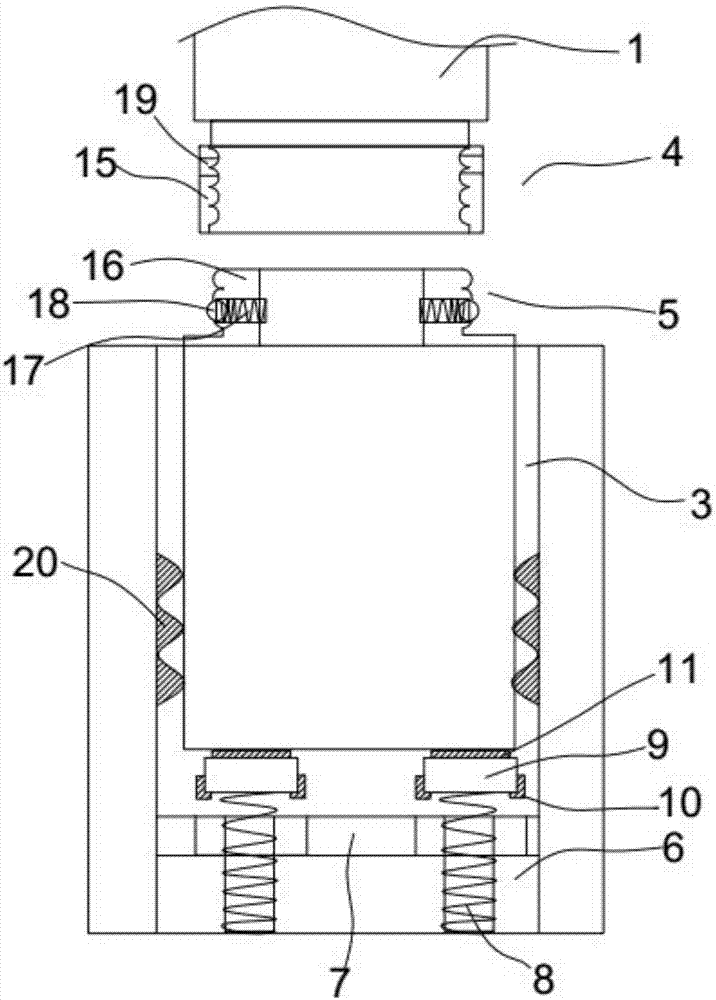
[0024] Such as figure 1 , figure 2 , image 3 As shown, the present invention proposes a quick replacement device for the end effector of a dual-arm collaborative robot, including a mechanical arm body 1, an actuator library 2 and an actuator located in the actuator library 2, and the actuator library 2 includes The housing cavity 3 arranged in a matrix is provided with an actuator identification device; the end of the mechanical arm body 1 is provided with a male end engagement mechanism 4, and the actuator is provided with a male end engagement mechanism 4 Cooperating female end engagement mechanism 5, the male end engagement mechanism 4 includes external thread 15, and the female end engagement mechanism 5 is an internal thread 16, and a passage is provided in the inte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More