

Self-adaptive Smith estimator-based tele-operation bilateral PID (proportion, integral and derivative) control method
A technology of self-adaptive control and control method, applied in the field of teleoperation, can solve the problems of large and low delay of master and slave terminals of teleoperation system, and no time delay link research.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to better understand the technical solutions of the present invention, the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0055] It should be clear that the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
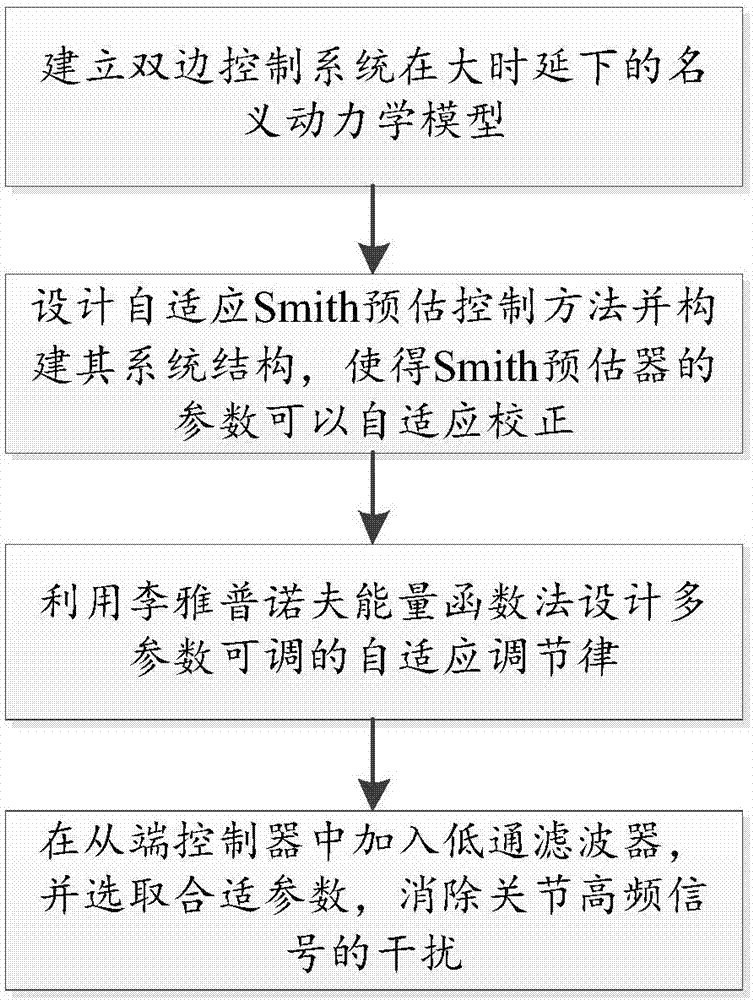
[0056] The present invention specifically comprises steps as follows:
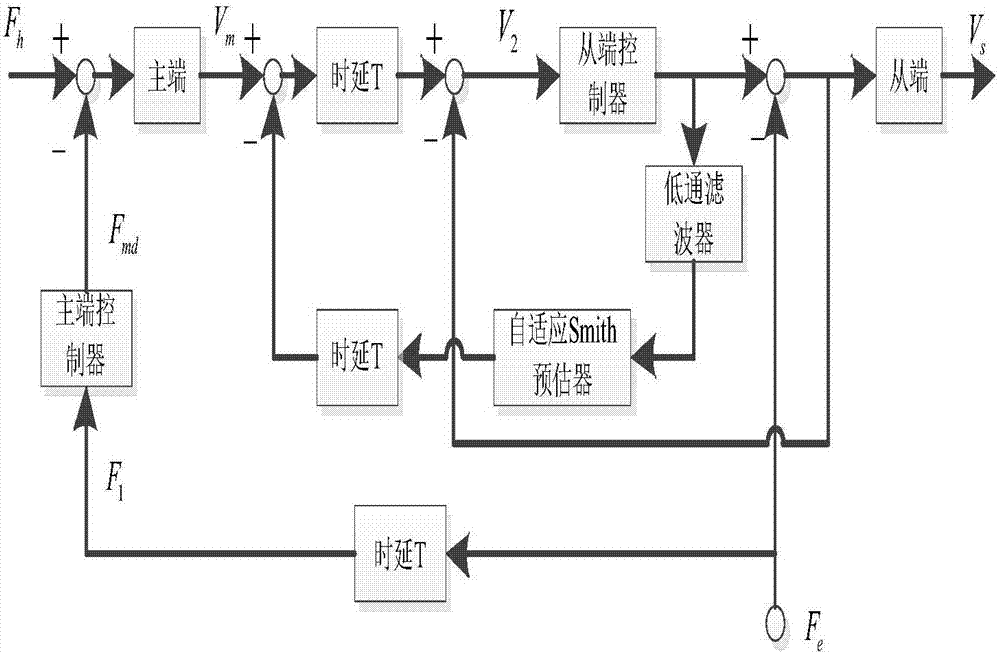
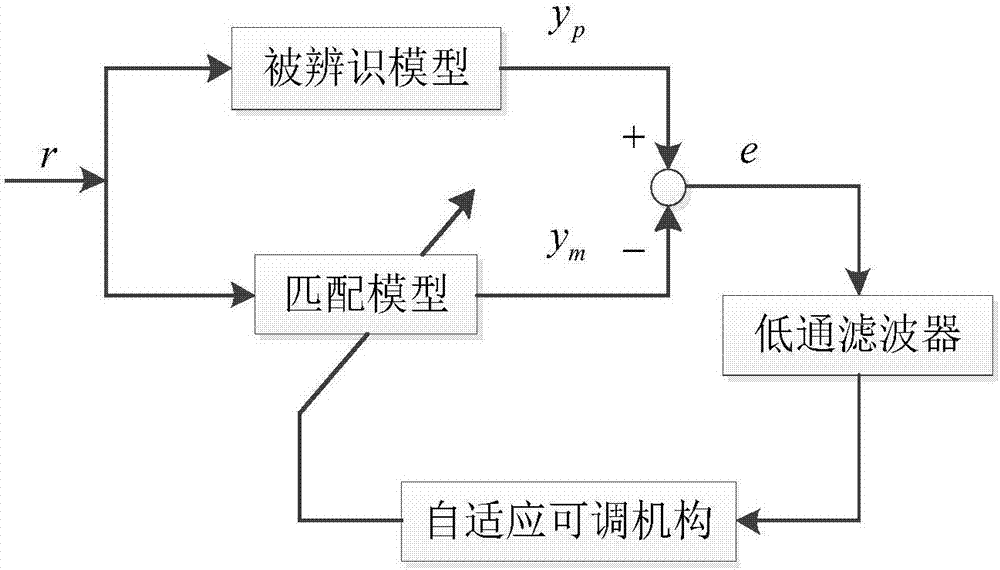
[0057] 1. Establish the nominal dynamic model of the teleoperation bilateral control system under large time delay; 2. Adaptive Smith predictive control method and its structure, and exchange the controlled process in the traditional model reference adaptive control with the reference model , so that the parameters of the Smith predictor can be adaptively cor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More