

Navigation simulation system of underwater-operation-level ROV and control method thereof
A technology of underwater operation and control method, which is applied in the direction of underwater ships, general control systems, control/regulation systems, etc. It can solve the system output signal instability, non-linear problems without solutions, and no artificial control input signals Correction and other problems to achieve the effect of performance improvement and controllability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
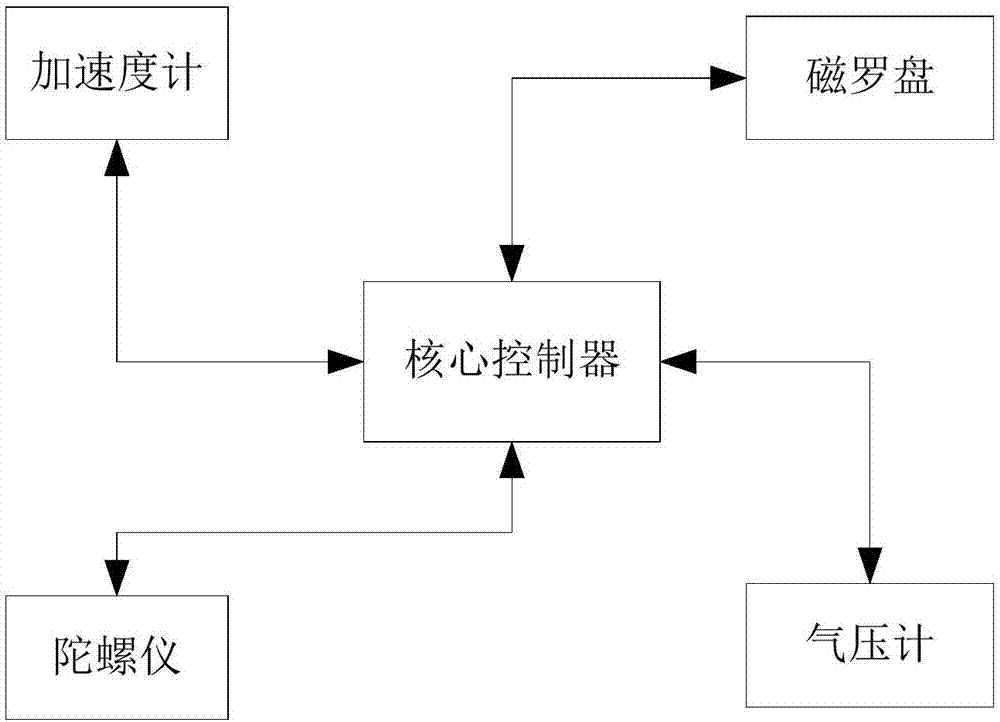
[0056] Specific Embodiment 1: Combining Figure 1 ~ Figure 3 Describe this embodiment, the overall structure of the navigation simulation system of the underwater operation level ROV in this embodiment, including: a lower computer and an upper computer, the lower computer is used for the acquisition and processing of simulated data, the lower computer is an ROV model, and the internal components Connection structure such as figure 1 As shown, including accelerometer, gyroscope, magnetic compass, barometer and core controller, the accelerometer, gyroscope and magnetic compass are used to collect simulated ROV status information, and the barometer obtains altitude information through the measured air pressure value , to simulate the depth information measured by the depth gauge in the underwater operation level ROV; the core controller includes a GPIO port and a digital-to-analog conversion module, which is used to process the simulated ROV state information collected by the sen...
specific Embodiment approach 2
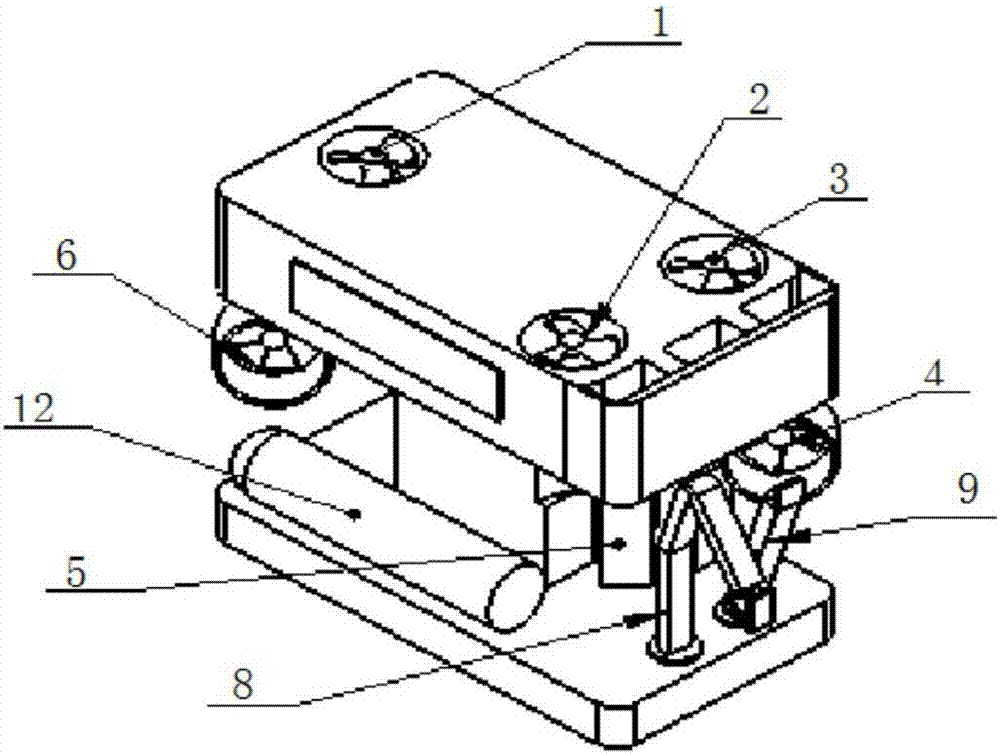
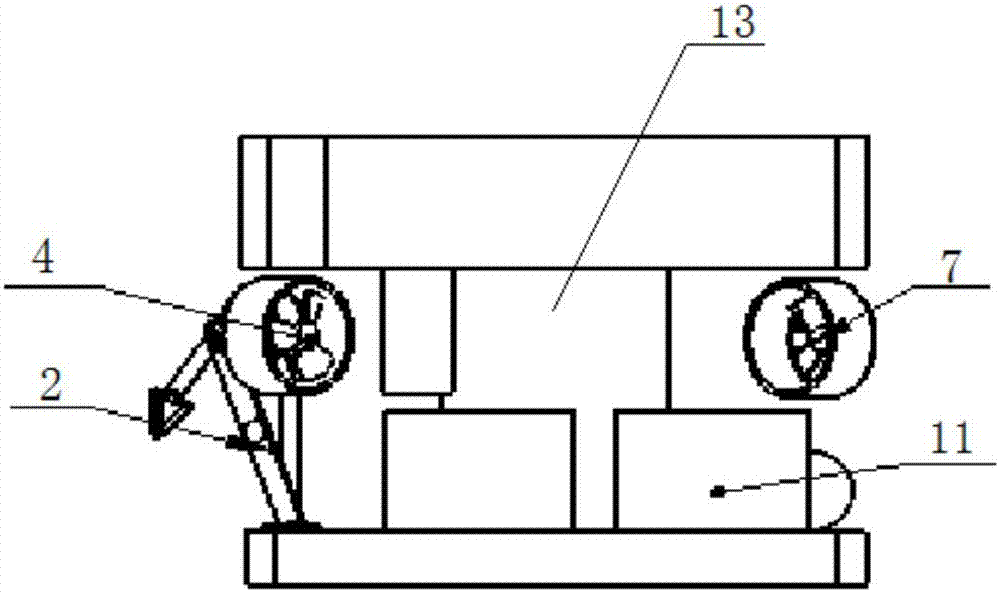
[0059] Specific Embodiment 2: Combining Figure 4 ~ Figure 8 To illustrate this embodiment, the flow of the control method implemented on the navigation simulation system of the underwater operation level ROV in Embodiment 1 is as follows: Figure 4 As shown, the specific steps include:
[0060] Step a, the lower computer device utilizes the GPIO port and the digital-to-analog conversion module inside the core controller to complete the data information acquisition tasks of the accelerometer, gyroscope, magnetic compass and barometer through the I2C data communication protocol;
[0061] Step b. After the host computer collects the above data information, use the Kalman filter algorithm to calculate the current attitude, heading, and height of the ROV model. In the data fusion scheme of the navigation attitude system, ordinary complementary filtering can be used to obtain relatively Stable attitude and heading information, but because the proportional item of complementary fil...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More