Sweeping robot resistant to impact
A cleaning robot and driving motor technology, applied in the field of cleaning robots, can solve problems such as high maintenance costs, inability to start the machine, wear and tear of cleaning robots, etc., and achieve the effects of scientific and reasonable structure, safe and convenient use, and improved stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
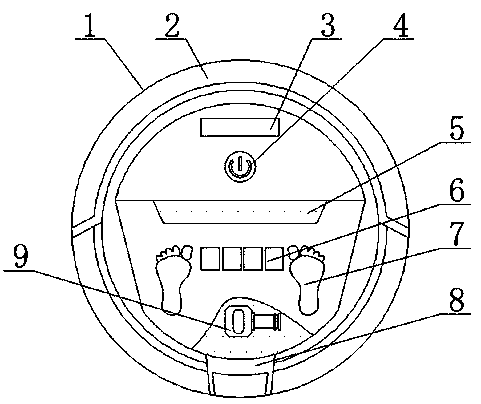
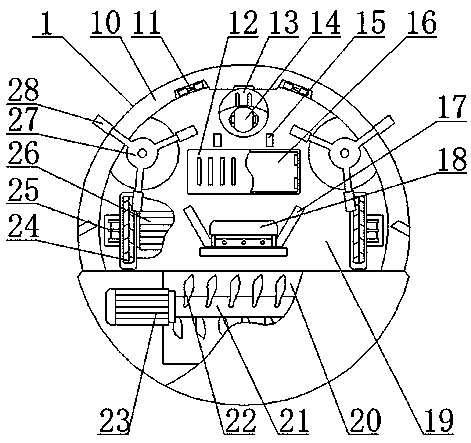
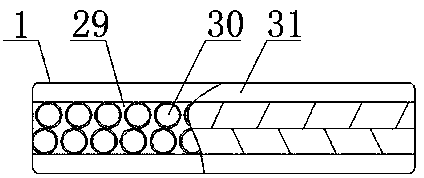
[0021] see Figure 1-4 , the present invention provides a technical solution: an impact-resistant cleaning robot, including a cleaning robot 1, a pressure sensor 9, a chassis 10, a drive motor 26, an elastic sleeve 31 and a damping pad 32, and an outer frame is arranged on the outside of the cleaning robot 1 2. A nameplate 3 is provided on the top of the upper surface of the cleaning robot 1, a start switch 4 is provided below the nameplate 3, an indicator lig...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More