

Intelligent fruit picking robot based on machine vision
A picking robot and machine vision technology, which is applied to picking machines, agricultural machinery and implements, harvesters, etc., can solve the problems of difficulty in ensuring the synchronization of mechanical actions, difficult to guarantee positioning accuracy, and complex overall structure, so as to improve the terrain passability. , the effect of rapid positioning and high degree of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, but the present invention is not limited in any way. Any changes or replacements made according to the teaching of the present invention belong to the protection scope of the present invention.
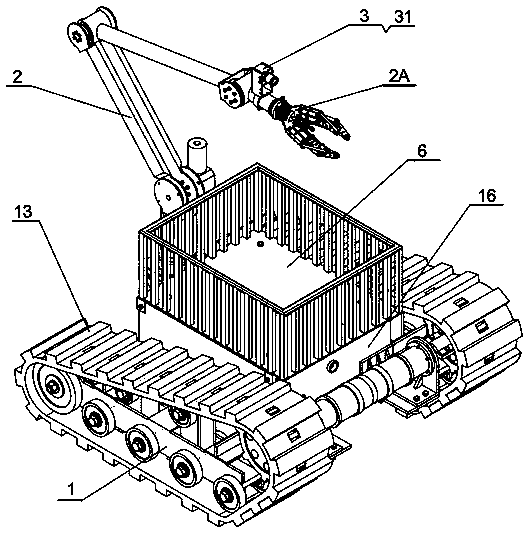
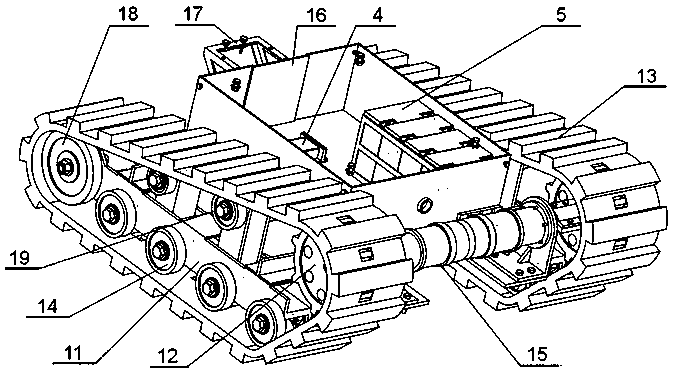
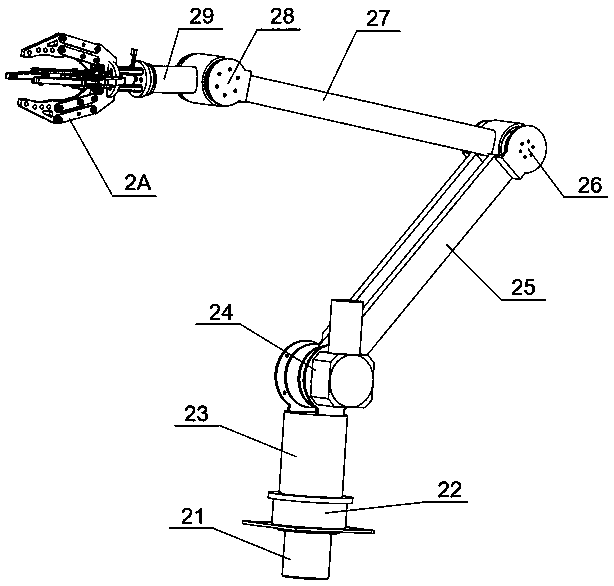
[0021] Such as Figures 1 to 5 As shown, the present invention includes a walking mechanism 1, a picking manipulator 2, a vision system 3, a control system 4, and a power supply system 5, and the control system 4 is connected to the walking mechanism 1, the picking manipulator 2, the vision system 3, and the power supply system 5 respectively. The control system 4 and the power supply system 5 are fixedly connected to the traveling mechanism 1, the picking manipulator 2 is a four-degree-of-freedom articulated manipulator and is fixedly connected to the traveling mechanism 1 through the base 22, and the visual sensor 31 of the vision system 3 is fixedly arranged A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More