

A citrus picking robot system and its control method
The technology of a picking robot and a control method is applied in the field of a citrus picking robot system and its control, which can solve the problems of poor navigation, incomplete picking, and long picking time, and achieve the effects of simple operation, avoiding picking omissions, and solving picking time consuming.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
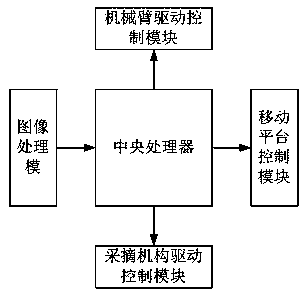
[0036]A citrus picking robot system, including a picking robot and a control system; the picking robot includes a crawler-type mobile platform and a housing fixedly arranged above the crawler-type mobile platform; a mechanical arm installation platform is fixedly arranged above the housing, and the mechanical arm installation platform A robotic arm is installed; a binocular lens for identifying and positioning fruit and a monocular lens for identifying a navigation path are also provided on the housing; the picking end of the robotic arm is equipped with a picking mechanism, which includes a shearing mechanism and a clamping mechanism ; There is a cavity for placing fruit baskets in the shell; the control system includes an image processing module for processing images captured by binocular lens and monocular lens, a mobile platform control module for controlling the crawler mobile platform, and a mobile platform control module for controlling the joints of the mechanical arm. ...
Embodiment 2
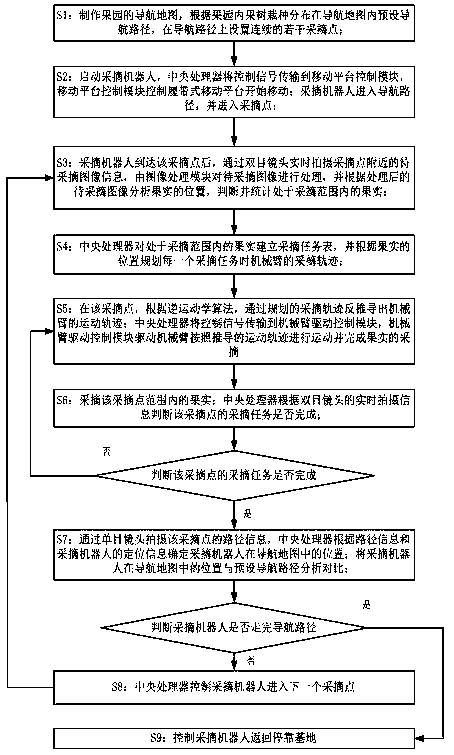
[0043] A control method for a citrus picking robot system, comprising the following steps:
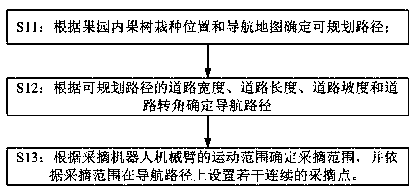
[0044] S1: First, make a navigation map of the orchard, preset a navigation path in the navigation map according to the distribution of fruit trees in the orchard, and set several consecutive picking points on the navigation path. In this step, the preset steps of the navigation path are as follows:
[0045] S11: Determine the planable path according to the planting position of the fruit trees in the orchard and the navigation map;
[0046] S12: Determine the navigation path according to the road width, road length, road slope and road corner angle of the planable path;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More