

An intelligent picking robot that prevents fruit damage
A technology for picking robots and fruits, applied in the field of agricultural robots, which can solve the problems of low reliability, large size, and slow picking efficiency of robotic arms, and achieve the effects of reduced failure rate, high picking accuracy, and reasonable collocation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
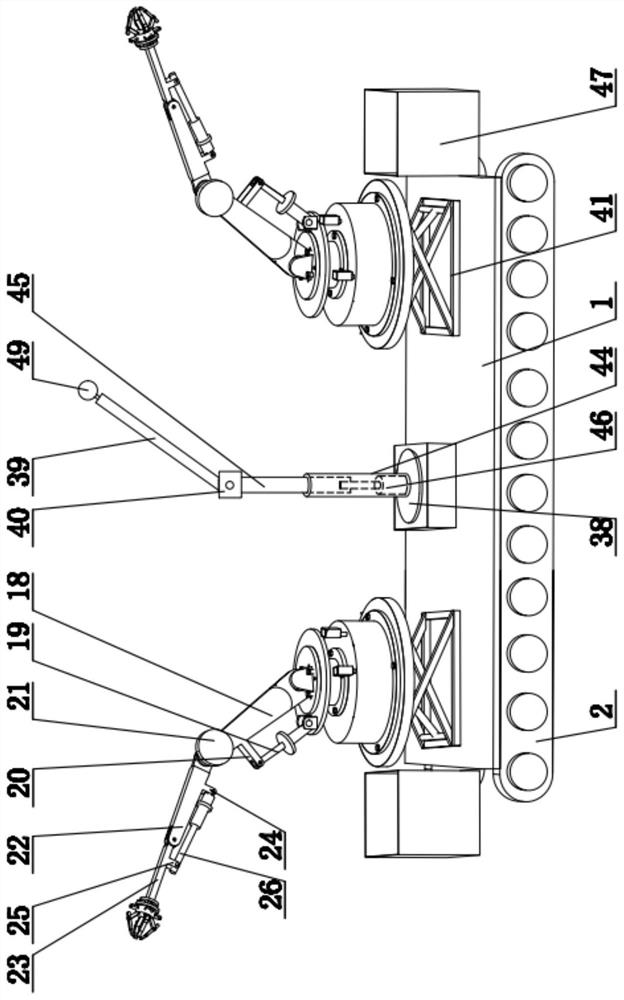
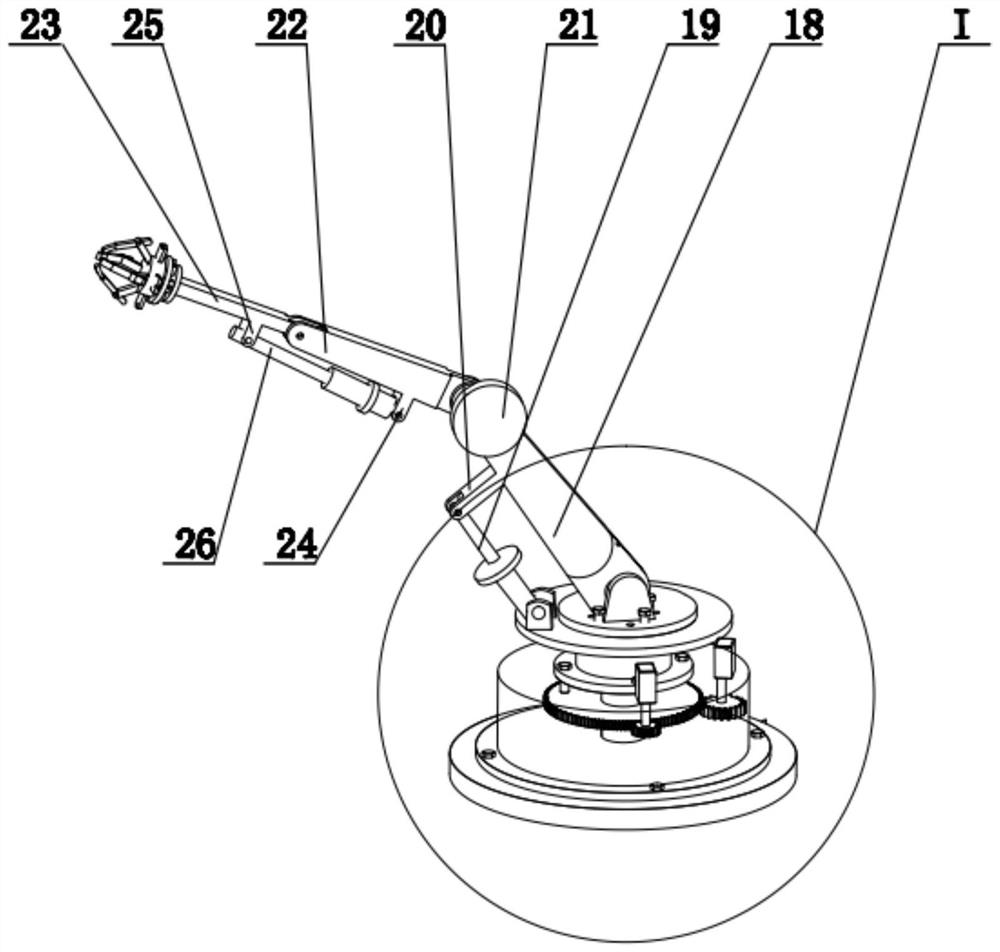
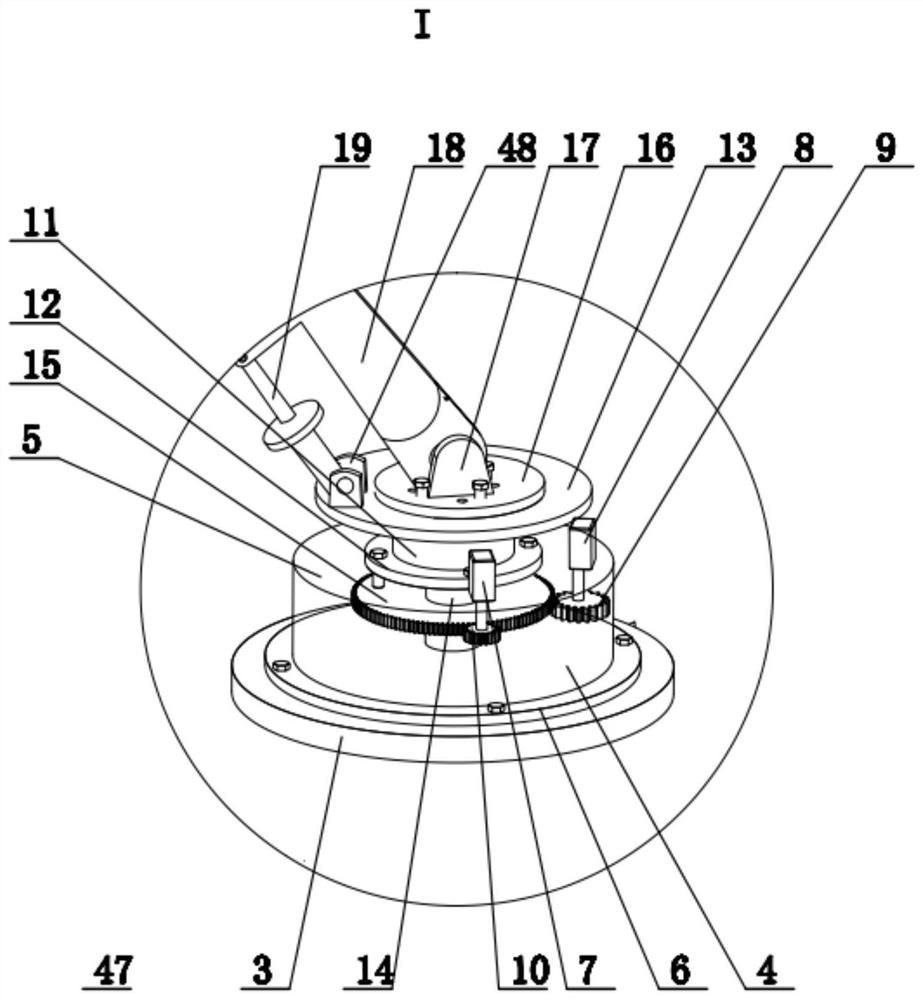
[0030]An intelligent picking robot for preventing fruit damage according to the present invention includes a mobile unit, a fruit picking unit, a detection unit and a processor unit, the moving unit includes a chassis 1, the fruit picking unit includes a first base 3, and the first base 3 is installed on the chassis 1 A fixed frame 4 is installed on the first base 3, a top plate 5 and a first fixed flange 6 are installed on the top and bottom of the fixed frame 4 respectively, the first fixed flange 6 is tightly connected with the first base 3 through bolts and nuts, and the top plate 5 The first rotating electrical machine 7 and the second rotating electrical machine 8 are fixedly installed, and the first rotating electrical machine 7 and the second rotating electrical machine 8 comprise a first rotating shaft and a second rotating shaft respectively, and the bottom of the first rotating shaft and the bottom of the second rotating shaft are respectively equipped with a large ge...
Embodiment 2
[0032] In a preferred embodiment, the visual sensor 49 is a camera with a position positioning function, the camera is used for visual recognition, the processor unit includes an image processor and a robot processor, the image processor is connected to the camera and the robot processor, and the robot processor Connect distance sensors and multiple position sensors. The quantity of the fruit-picking unit is two, and the two fruit-picking units are on both sides of the detection unit.
[0033] In a preferred embodiment, the robot processor is also connected to the first rotary motor 7, the second rotary motor 8, the third rotary motor 30, the fourth rotary motor 21, the fifth rotary motor 40, the first cylinder 19, the second cylinder 26. The chassis motor sends instructions according to the position information.
Embodiment 3
[0035] In a preferred embodiment, crawler belts 2 are installed on both sides of the bottom of the chassis 1, and the crawler belts 2 are connected to the chassis motor. The first base 3 is fixedly connected to the chassis 1 through a scissor lift frame 41. 3 is fixedly connected with chassis 1.
[0036] In a preferred embodiment, fruit baskets 47 are respectively installed at both ends of the chassis 1 , and a sponge layer is laid inside the fruit baskets 47 .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More