

Method and system for automatic robot teaching using vision and laser range finder
A technology of laser range finder and robot, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc. It can solve the problems of life safety impact on operators, inability to achieve a high degree of consistency, high skill requirements, etc., to achieve good consistency, The effect of reducing labor cost input and high teaching accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
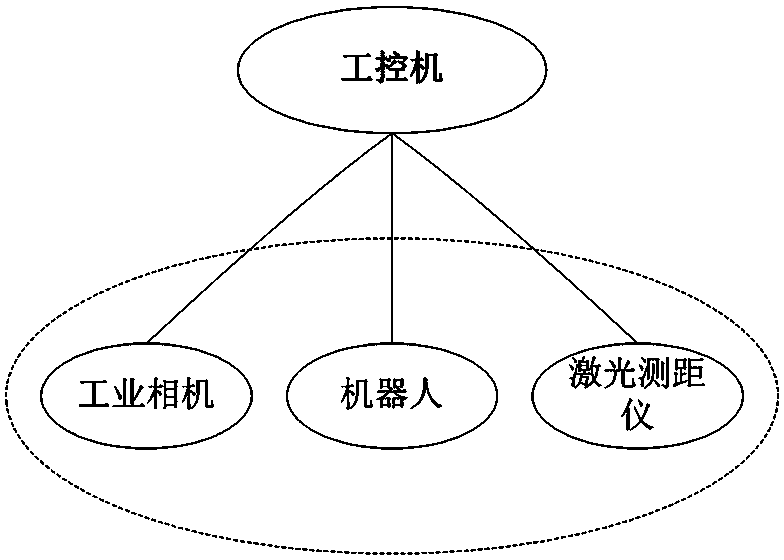
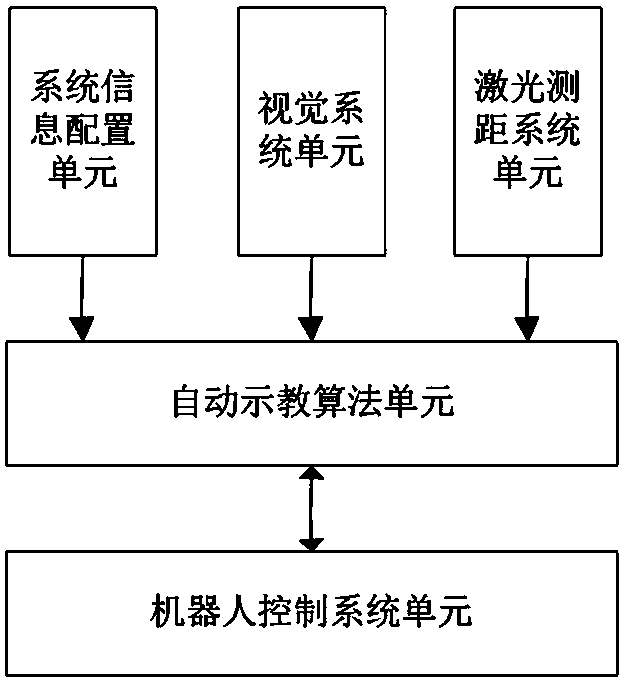
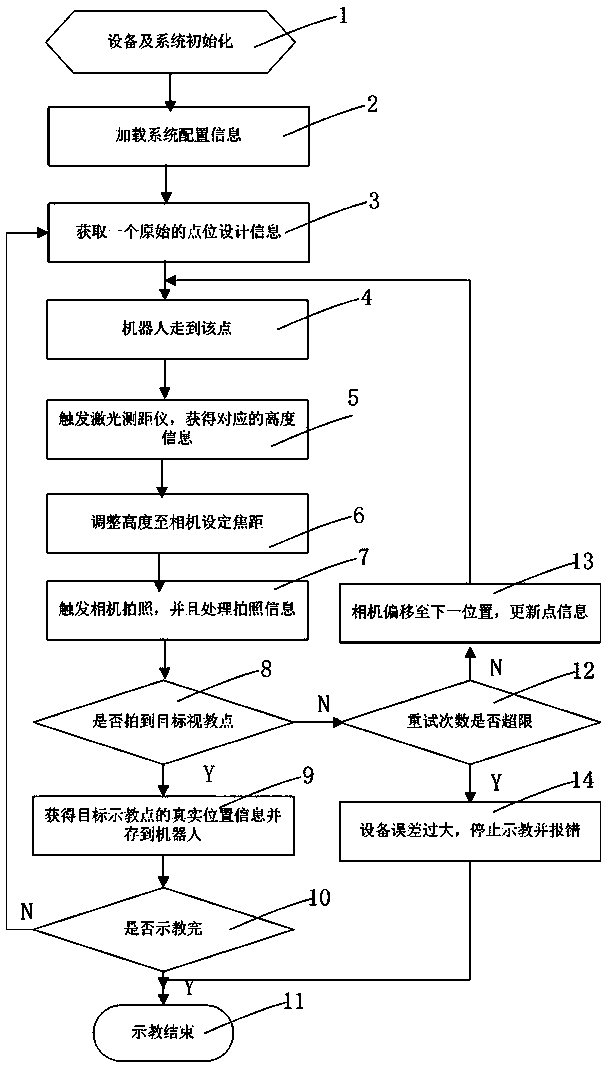
[0019] The invention provides a method and device for realizing automatic teaching based on the original point design information of the target teaching point provided by the mechanism designer, using an industrial camera and a laser range finder in cooperation with a robot. Due to factors such as assembly and processing, there is often a certain error between the actual position information of the target teaching point and the original point design information (such as original coordinates, angles, etc.). The present invention can automatically identify the actual position information of the target teaching point according to the original point design information, and then update the movement path of the robot, and perform fast automatic teaching on multiple target points, and at the same time, the error is too large to pass Teaching unqualified equipm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More