

Slam method and Slam device based on prior information
A priori information and map technology, applied in the direction of measurement devices, radio wave reflection/re-radiation, special data processing applications, etc., can solve the problems of not considering features and feature constraints, structural information cannot be used, etc., to reduce The effect of cumulative error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0048] In order to make those skilled in the art more clearly understand the technical problems, technical solutions and beneficial technical effects to be solved by the present invention, the present invention will be further elaborated below in conjunction with the accompanying drawings and embodiments.
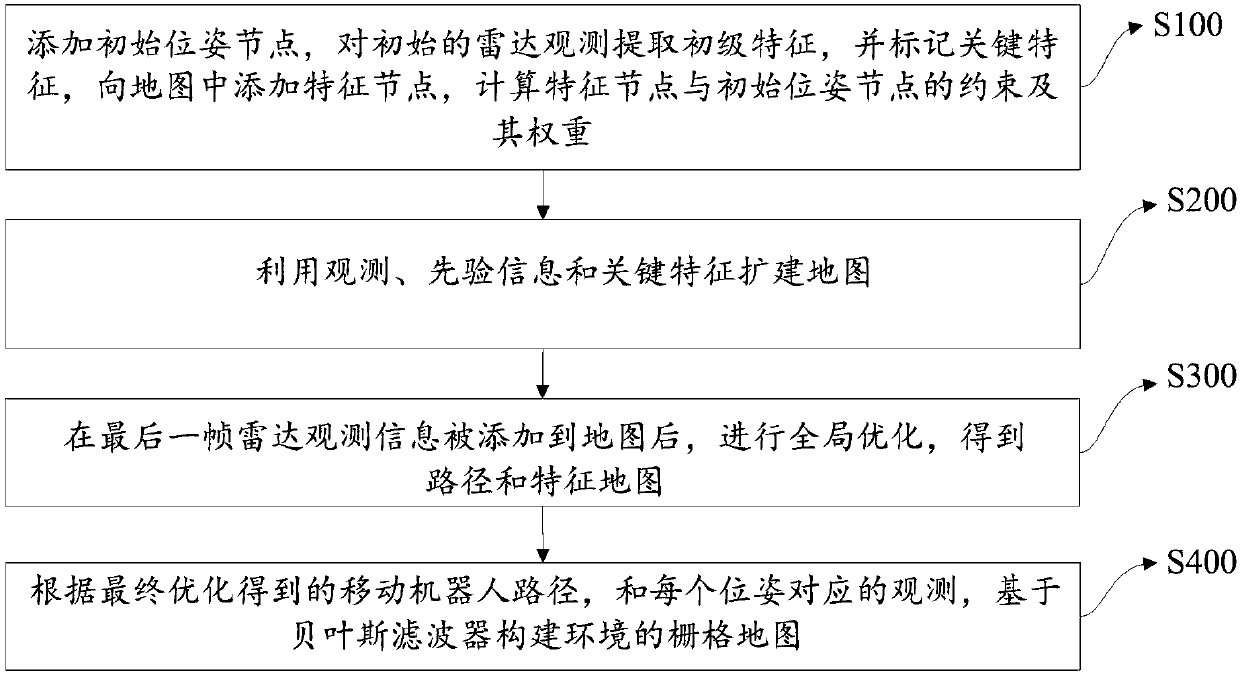
[0049] Please refer to figure 1 , a Slam method based on prior information, said method comprising:
[0050] S100: Add an initial pose node, extract primary features from the initial radar observation, and mark key features, add feature nodes to the map, and calculate constraints and weights of feature nodes and initial pose nodes;
[0051] For the extraction of line segment and arc features, it is first necessary to correct the radar observation data according to the calibration model (such as polynomial), and if it is a radar that has been used for a long time, it is necessary to denoise the data. The scanning result of the radar for a flat surface or a surface with a c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More