

Event-triggered multi-parafoiled unmanned aerial vehicle system
An event-triggered, unmanned aerial vehicle technology, applied in attitude control, three-dimensional position/channel control, etc., can solve the problem of not being able to cope with the violent shaking of parafoil drones, and not considering the travel planning and control of multiple parafoil drone systems Questions and other questions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
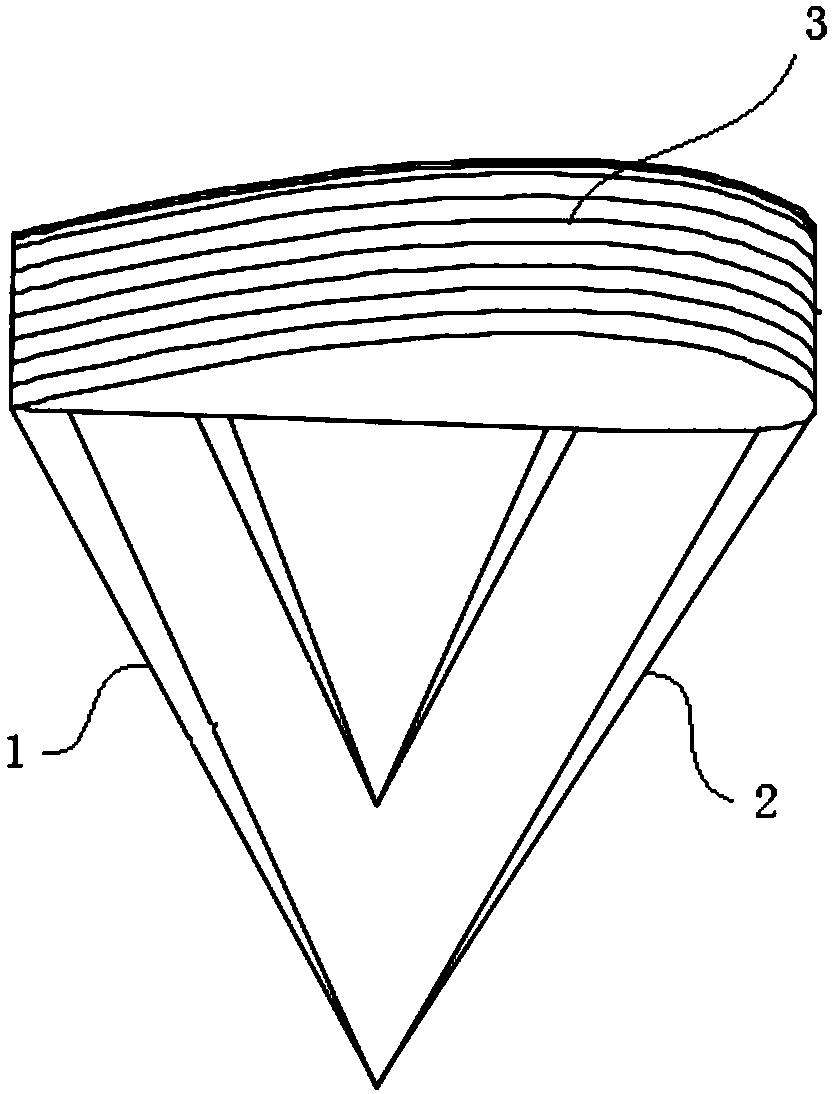
[0085] like figure 1 As shown, the structural diagram of the parafoil UAV is mainly composed of the left control rope 1, the right control rope 2, the parafoil 3, and the steering gear.
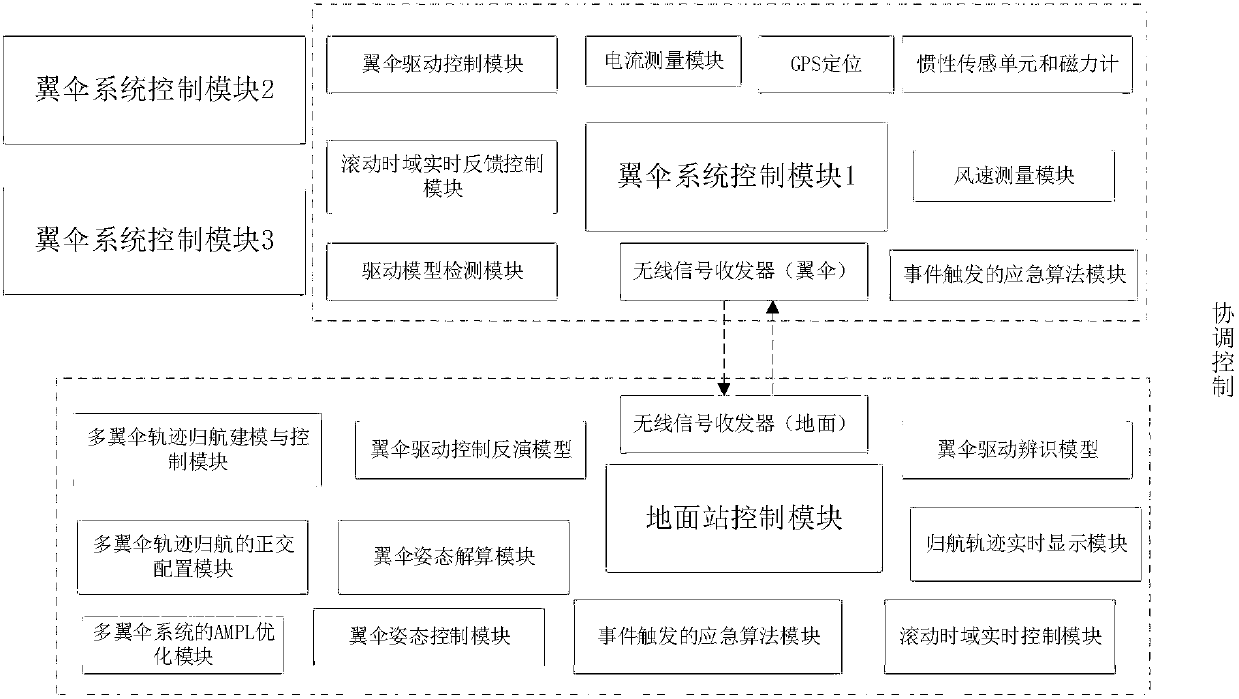
[0086] An event-triggered multi-parafoil UAV system consists of a ground control station and multiple parafoil UAVs. Each parafoil UAV has a measurement sensor module, a parafoil drive control module and steering gear, and a driving model The detection module and the parafoil drive control module enable the steering gear to control the length of the control rope, and the measurement sensor module measures the real-time information of the parafoil UAV. The real-time information includes: acceleration information, angular velocity information, the orientation determined by the magnetometer and the position of the control rope length, and the actual drive current of the steering gear.
[0087] The ground control station has a trajectory planning module, a parafoil attitude calculation module, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More