

Vehicle full fly-by-wire manipulation system
A fly-by-wire control system and vehicle technology, applied in the field of ground vehicle control systems, can solve the problems of unfriendly omnidirectional ground vehicle control interface, hindering the application of omnidirectional ground vehicles, and difficulty in universal use of automatic driving systems, so as to improve flexibility and Safety, weight and complexity reduction, fun effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] A vehicle full-fly-by-wire control system based on a traditional vehicle control interface proposed by the present invention will be described in detail below with reference to the drawings and embodiments.
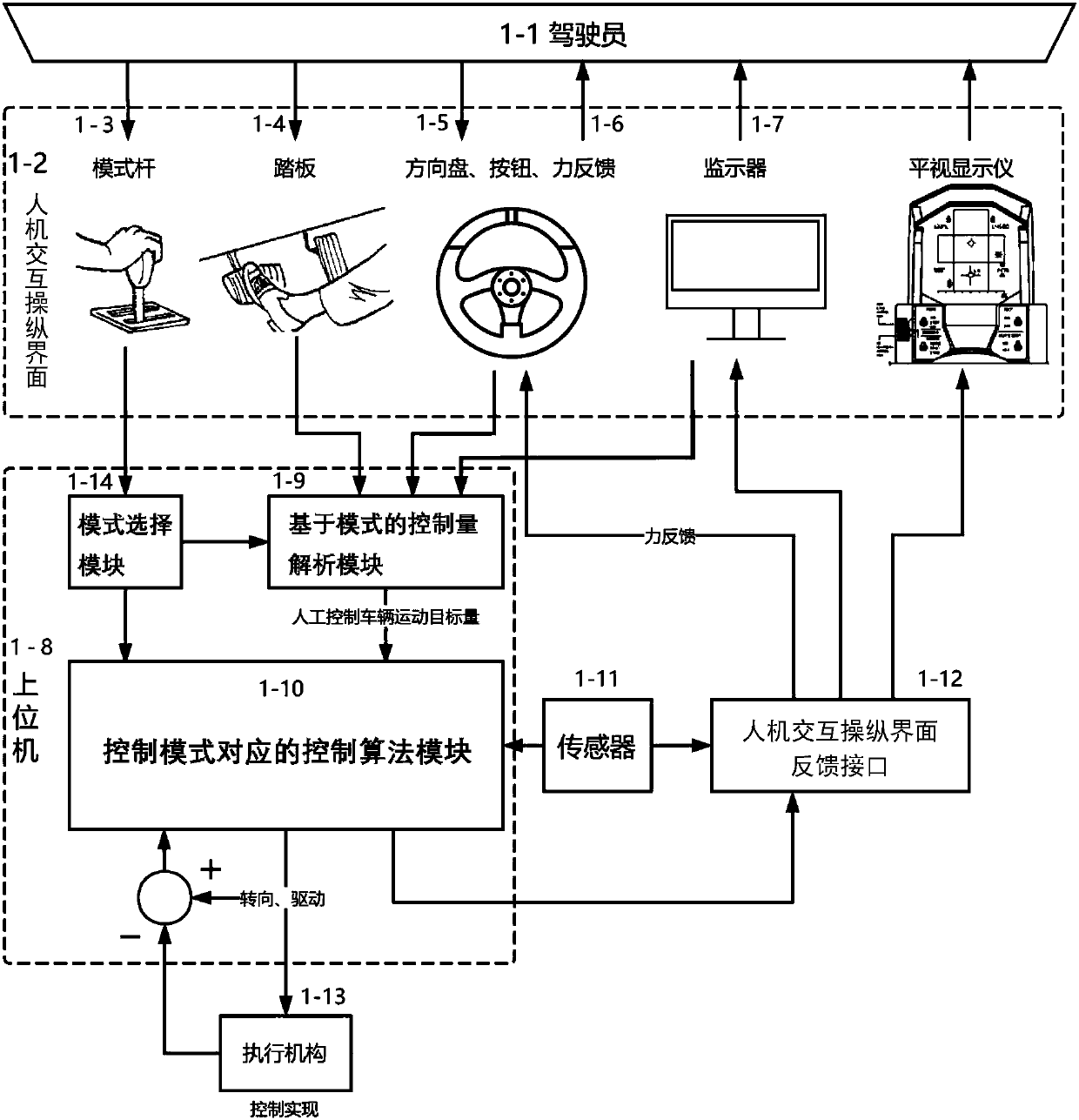
[0025] A vehicle full fly-by-wire control system proposed by the present invention has an overall structure as follows: figure 1 As shown, the system includes: human-computer interaction manipulation interface 1-2, human-computer interaction manipulation interface feedback interface 1-12, host computer 1-8, sensor 1-11 and actuator 1-13; human-computer interaction manipulation interface ( The appearance of the human-computer interaction operation interface is the same as that of the traditional vehicle operation interface, and the difference is that the traditional vehicle operation interface is directly connected with the vehicle's motion actuator through mechanical components, and the driver's control instructions for the vehicle and the vehicle's motion state aff...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More