

Robot wrist joint mechanism driven by omnidirectional wheels
A robot wrist and omni-directional wheel technology, applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of large volume, complex structure, large vibration and noise, etc., and achieve the effect of smooth movement, flexible steering, and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions of the present invention will be further described below in conjunction with the embodiments shown in the accompanying drawings.
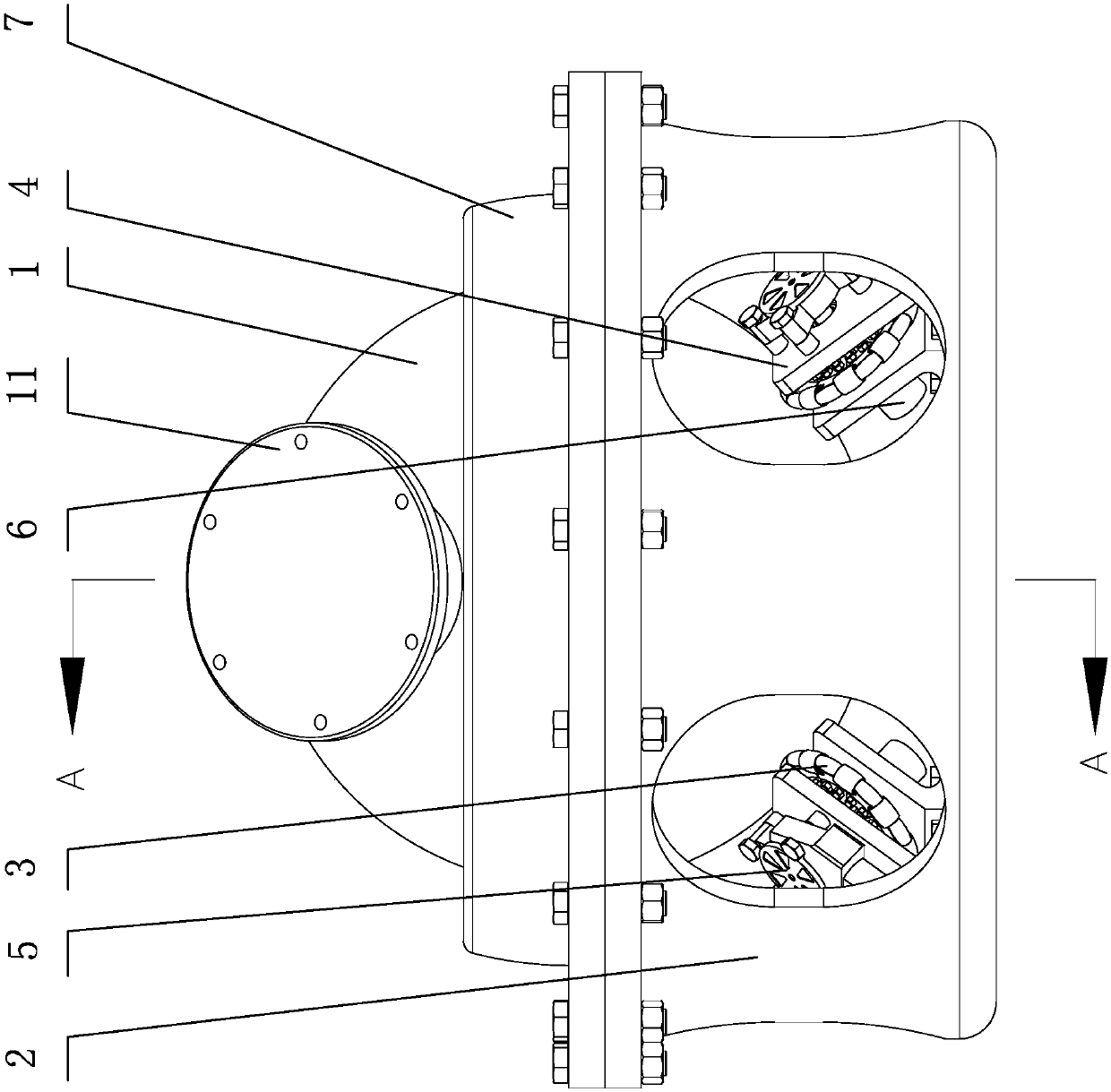
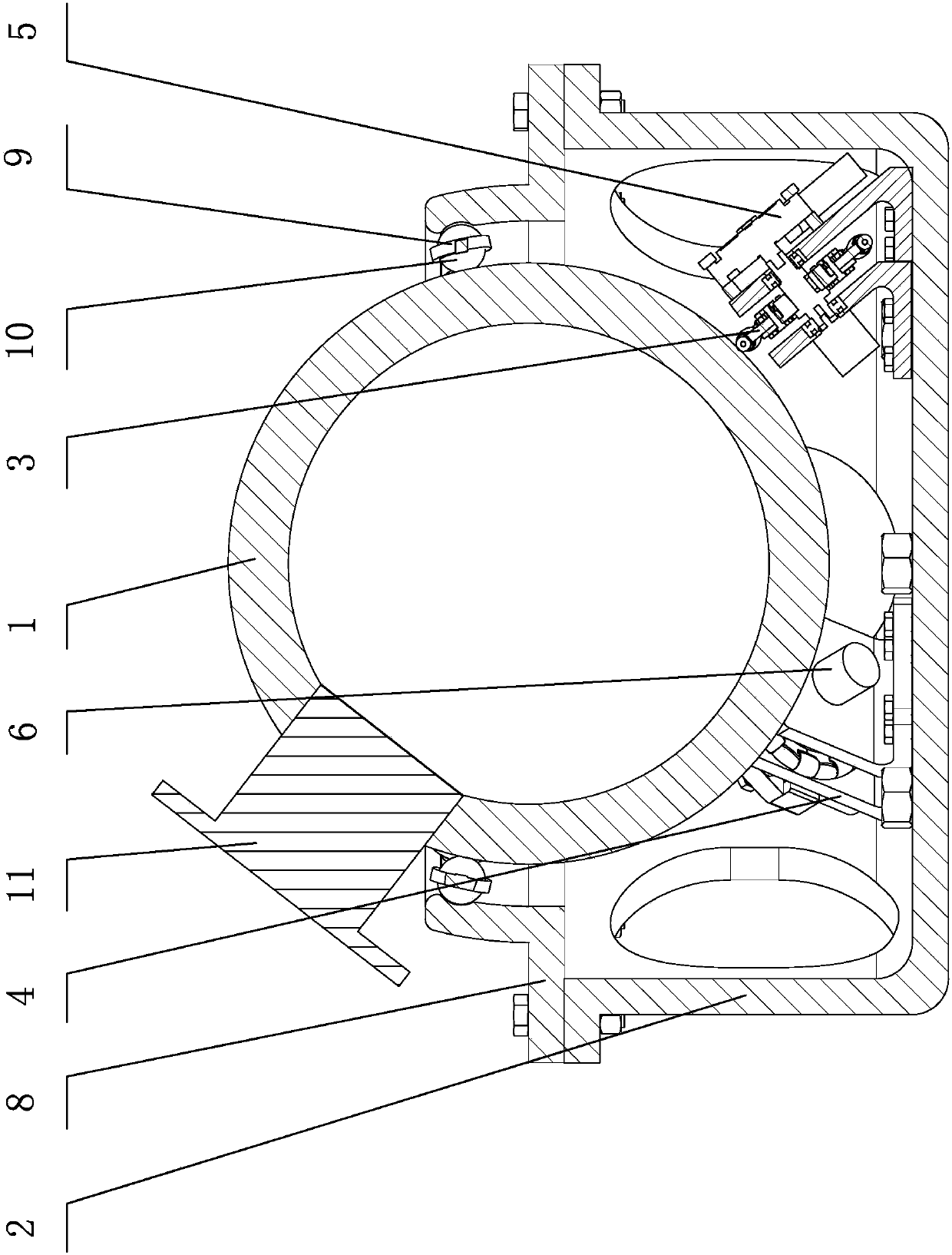
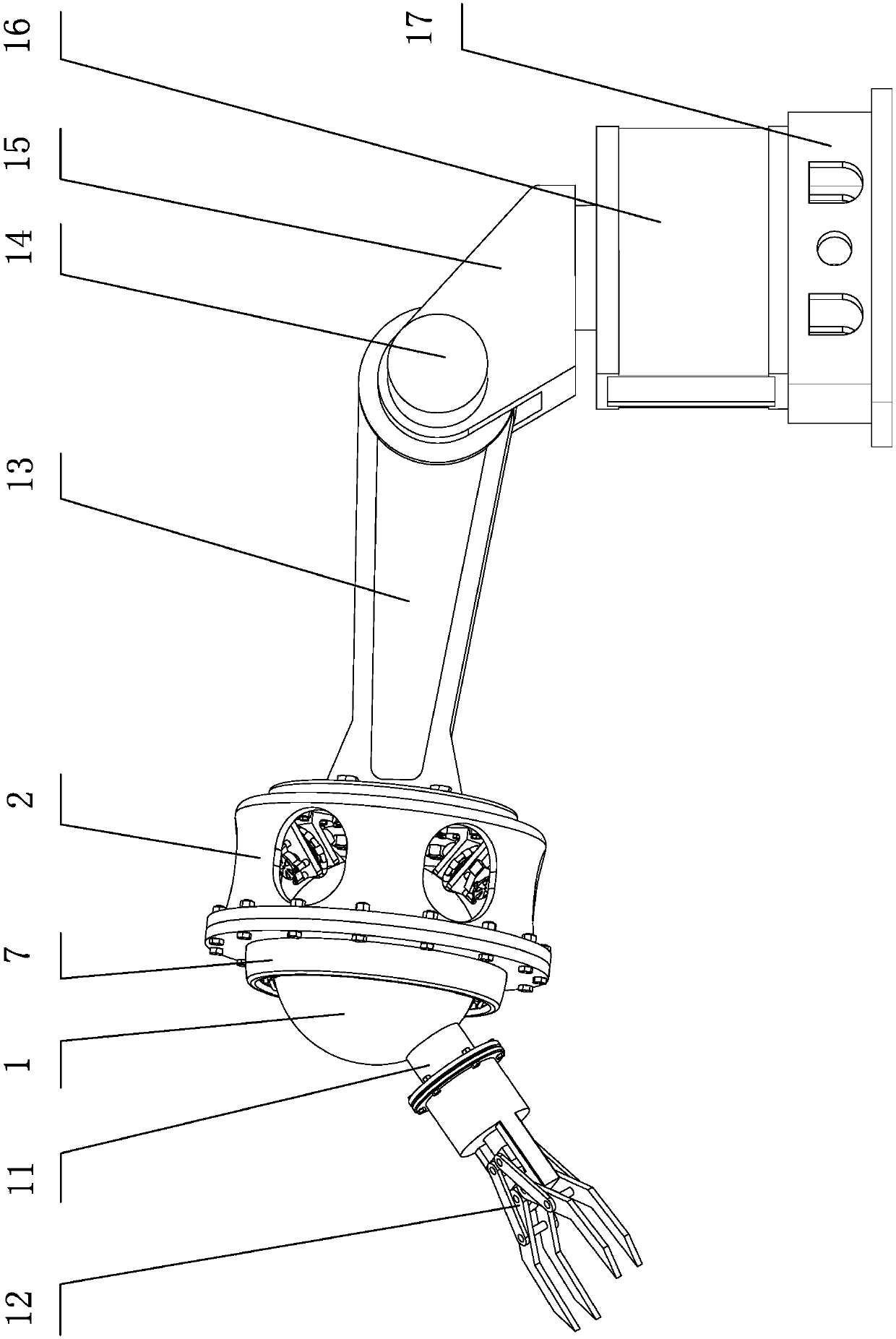
[0018] The omnidirectional wheel-driven robot wrist joint mechanism of the present invention includes a ball joint 1, a ball joint cup frame 2 and a single row of omnidirectional wheels 3, the lower hemisphere of the ball joint 1 is centered in the ball joint cup frame 2, Three single-row omnidirectional wheels 3 are evenly distributed on the inner circumference of the ball joint cup frame 2 and are in frictional contact with the lower hemisphere of the ball joint 1, and the three single-row omnidirectional wheels 3 pass through the corresponding wheel frame 4 (installed on the ball joint Cup frame 2) is installed and the centerlines of rotation of three single-row omnidirectional wheels 4 are obliquely downward and intersect at one point. The ball joint motor 5 of the single-row omnidirectional wheel 3 and the encode...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More