

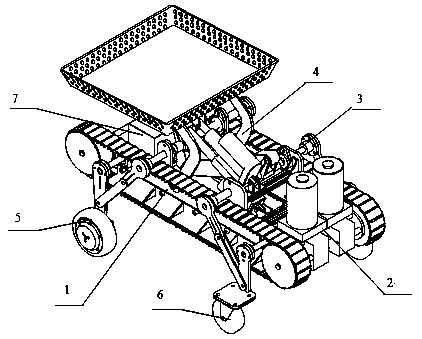
Object-loading robot which can move as well as climb stairs
A robot and object-carrying technology, which is applied in the field of robotics, can solve the problems of complex structure, difficulty in popularization, and low cost performance of climbing-stairs-carrying robots, and achieve the effects of easy promotion, light weight, and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
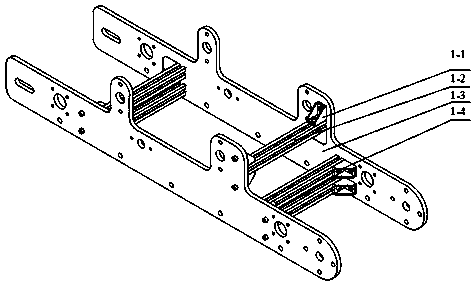
[0024] The present invention will be further described in conjunction with accompanying drawing, as image 3 As shown, there are two main support plates 1-3 for parts installation and they are symmetrically distributed, and the two main support plates 1-3 are connected with the supporting aluminum material 1-2 through the connecting corner code 1-1, together Constitute the support frame 1 of the present invention, wherein the connection between the connecting angle bracket 1-1 and the main support plate 1-3 and the supporting aluminum material 1-2 is realized by connecting screws 1-4, and the control unit 7 of the robot is fixedly connected to the On the supporting aluminum material 1-2, the connecting corner code 1-1 improves the stability of the supporting aluminum material 1-2 being fixed on the supporting frame 1.
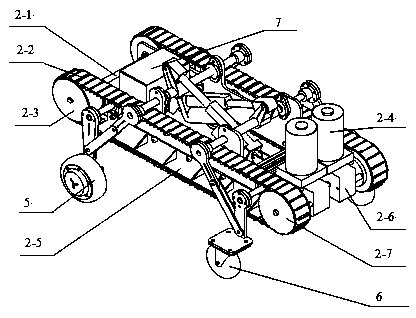
[0025] Such as figure 2 As shown, the crawler belt driving mechanism 2 is divided into left and right two, and is symmetrically installed on two main support...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More