

A Predictive Control Method of Space Robot Based on Quantum Particle Swarm Optimization
A space robot, quantum particle swarm technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., to achieve the effect of effective tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
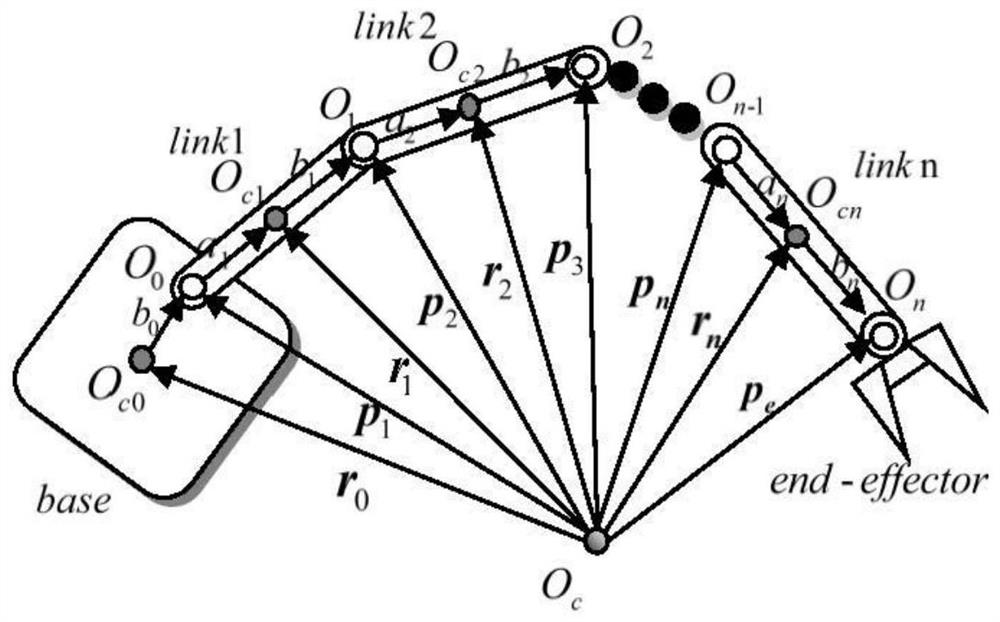
[0023] The train of thought of the present invention is: first establish the Lagrangian dynamics model of space robot system based on the extended manipulator method, combine it with the kinematics model and establish the discretized state-space model; The corresponding discrete model predictive controller is designed by the Gail polynomial. Finally, the quantum particle swarm algorithm is used to perform rolling optimization on the performance index under constraints, and feedback correction is made to the prediction error, so as to realize the effective tracking of the expected trajectory at the end.
[0024] The specific solution method is as follows:
[0025] (1) Based on the principle of conservation of momentum, the velocity-level kinematics model of the space robot i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More