

Moving target dynamic tracking method, system and device based on S-curve acceleration and deceleration
A tracking device and dynamic tracking technology, applied in the direction of program control manipulators, manufacturing tools, manipulators, etc., to achieve the effect of improving tracking efficiency, ensuring accuracy, good dynamic performance and grasping efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0078] The purpose of Embodiment 1 is to provide a dynamic tracking method for a moving target based on S-curve acceleration and deceleration.
[0079] In order to achieve the above object, the present invention adopts the following technical scheme:
[0080] Such as figure 1 as shown,
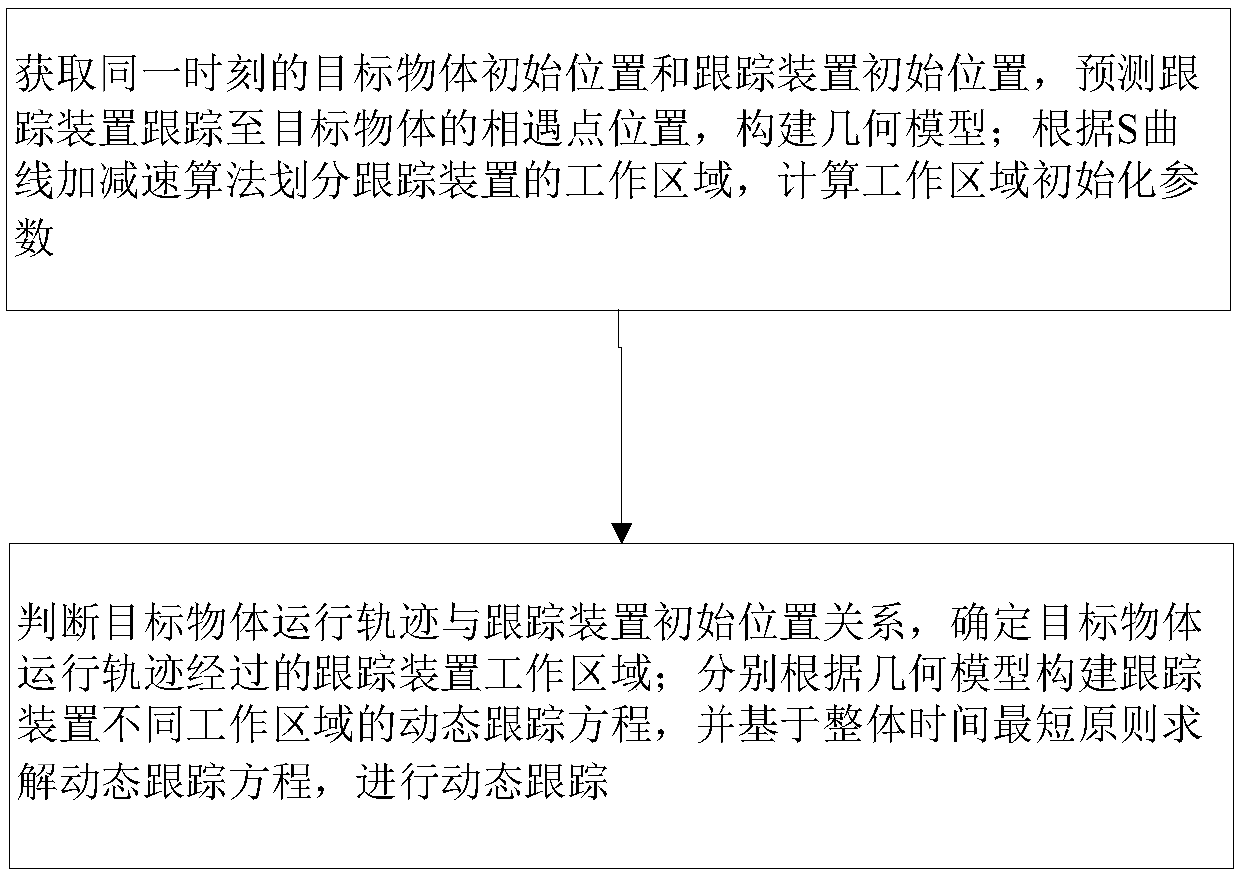
[0081] A method for dynamic tracking of a moving target based on S-curve acceleration and deceleration, the method comprising:
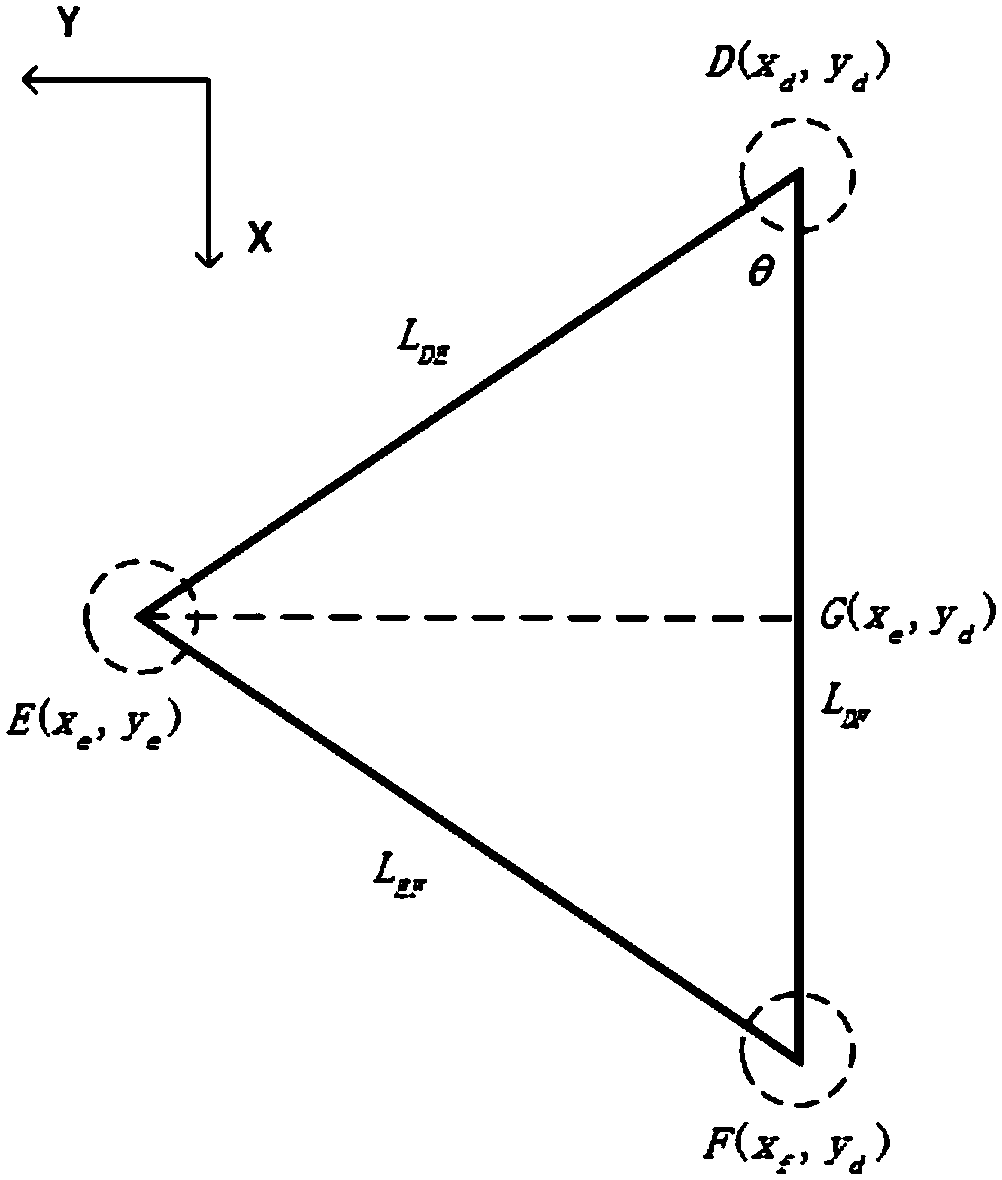
[0082] Obtain the initial position of the target object and the initial position of the tracking device at the same time, predict the meeting point where the tracking device tracks the target object, and build a geometric model; divide the working area of the tracking device according to the S-curve acceleration and deceleration algorithm, and calculate the initialization parameters of the working area;
[0083] Judging the relationship between the trajectory of the target object and the initial position of the tracking device, determining the working area of t...
Embodiment 2
[0242] The purpose of Embodiment 2 is to provide a dynamic tracking method for a moving target based on S-curve acceleration and deceleration. Based on the basis of Embodiment 1, this embodiment adds a method for solving the dynamic tracking equation.
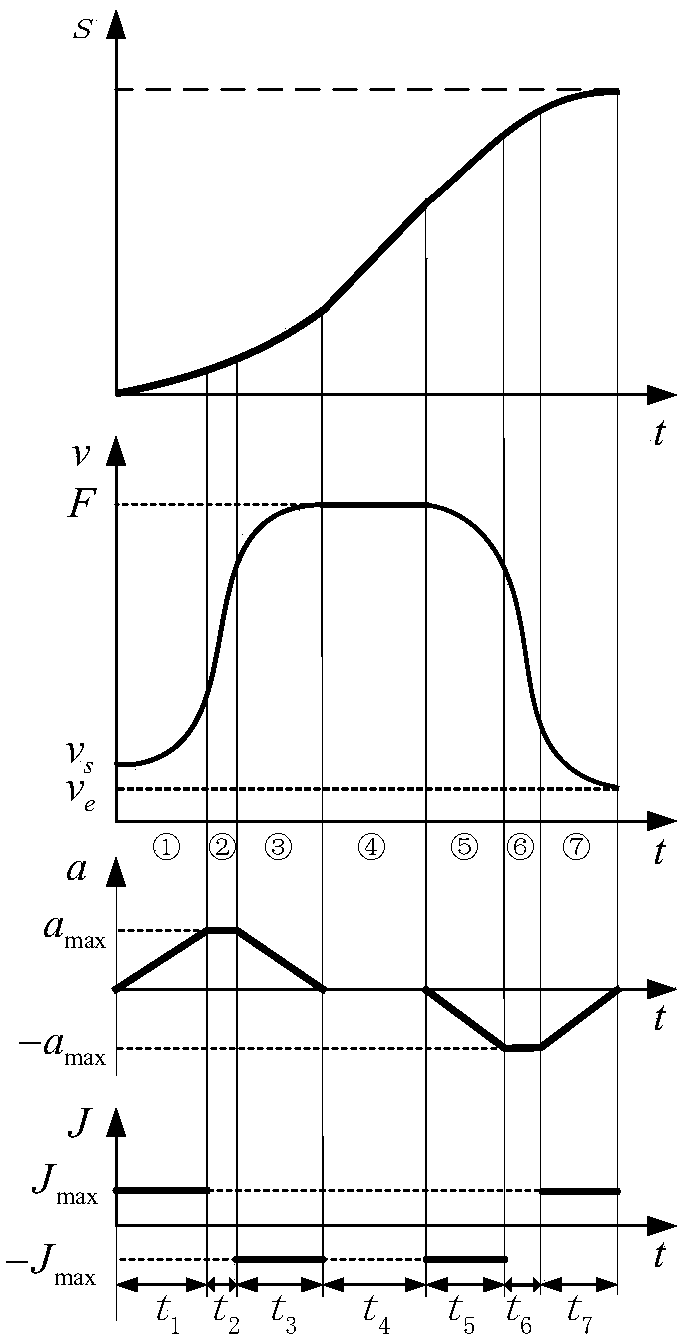
[0243] The dynamic tracking equation in the working area of the tracking device can be analyzed by using a physical model and solved by a numerical analysis method; the solvability analysis of the dynamic tracking equation is a physical problem, and because the equations (11), (20), (29), (51) The situation is complicated, and it is difficult to analyze the monotonicity of the interval and the distribution of the solution only from the mathematical point of view. In order to analyze the uniqueness of the solution in the interval, this embodiment proposes a method based on actual work. The monotonicity of each equation in the value range is analyzed by using the simplified physical model and the S-curve displacement time graph...
Embodiment 3
[0263] The purpose of Embodiment 3 is to provide a computer-readable storage medium.
[0264] In order to achieve the above object, the present invention adopts the following technical scheme:
[0265] A computer-readable storage medium, in which a plurality of instructions are stored, and the instructions are suitable for being loaded by a processor of a terminal device and performing the following processing:
[0266] Obtain the initial position of the target object and the initial position of the tracking device at the same time, predict the meeting point where the tracking device tracks the target object, and build a geometric model; divide the working area of the tracking device according to the S-curve acceleration and deceleration algorithm, and calculate the initialization parameters of the working area;
[0267] Judging the relationship between the trajectory of the target object and the initial position of the tracking device, determining the working area of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More