

Improved SCARA robot kinetic parameter identification method
A dynamic parameter and identification method technology, applied in the field of improved SCARA robot dynamic parameter identification, can solve problems such as acceleration signal error and transmission error, and achieve the effect of avoiding transmission error.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] In order to make the purpose, technical solution and beneficial effects of the present invention clearer, the present invention will be further described in detail below with reference to the accompanying drawings and in conjunction with a specific SCARA robot.
[0041] Step (1): Establish a complete dynamic model of the first two joints of the SCARA robot using the Lagrange method.
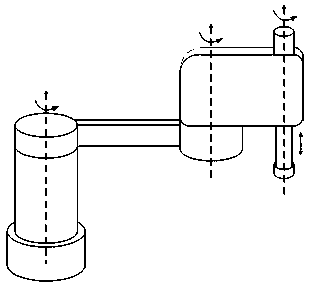
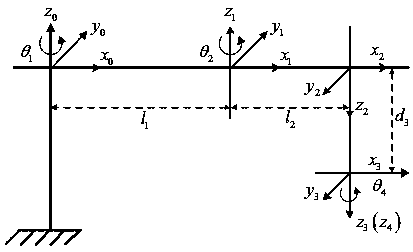
[0042] attached by figure 2And attached image 3 It can be seen that joints 3 and 4 of the SCARA robot share a connecting rod, and the servo motors, timing belts, ball screws, and lifting tables of joints 2, 3, and 4 are all installed on the connecting rod of joint 2, so joints 1 and 4 2 determines the plane positioning accuracy and trajectory tracking accuracy of the SCARA robot, and joint 3 determines the vertical movement. Since joint 3 is perpendicular to the first two joints, the movement of the first two joints will not affect joint 3. Therefore, only joint 1 and joint 2 are used...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More