

Improved closed-loop detection algorithm-based mobile robot vision SLAM (Simultaneous Location and Mapping) method
A mobile robot and closed-loop detection technology, which is applied to computer components, instruments, calculations, etc., can solve the problems of low closed-loop efficiency and low accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0056] The technical scheme that the present invention solves the problems of the technologies described above is:
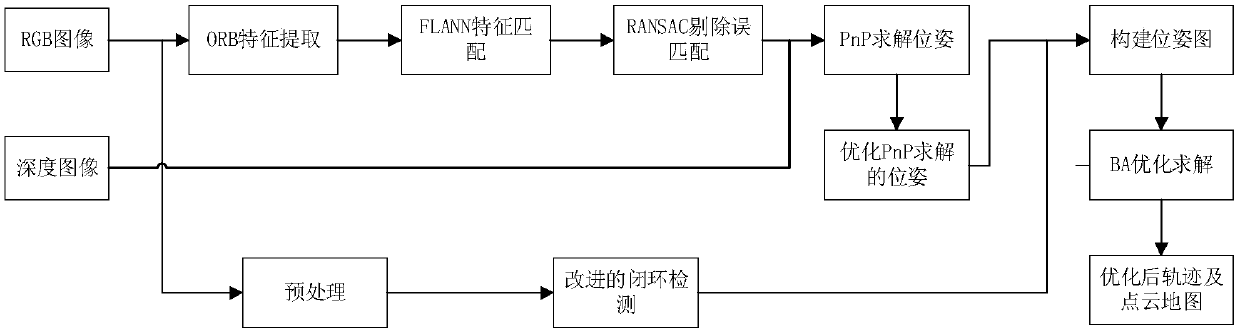
[0057] like figure 1 As shown, the present invention provides a kind of mobile robot visual SLAM method based on improved closed-loop detection algorithm, it is characterized in that, comprises the following steps:
[0058] S1, use Zhang Dingyou calibration method to calibrate Kinect; correct camera distortion and obtain camera internal parameters; Zhang Dingyou calibration method is a calibration method that only needs to use a printed checkerboard to obtain camera internal parameters.
[0059] S2, using opencv to extract ORB features from RGB images, the obtained ORB features are robust an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More