

A method, system and device for unmanned driving path planning
A path planning and unmanned driving technology, which is applied in the directions of measuring devices, control devices, transportation and packaging, etc., can solve the problems of poor scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
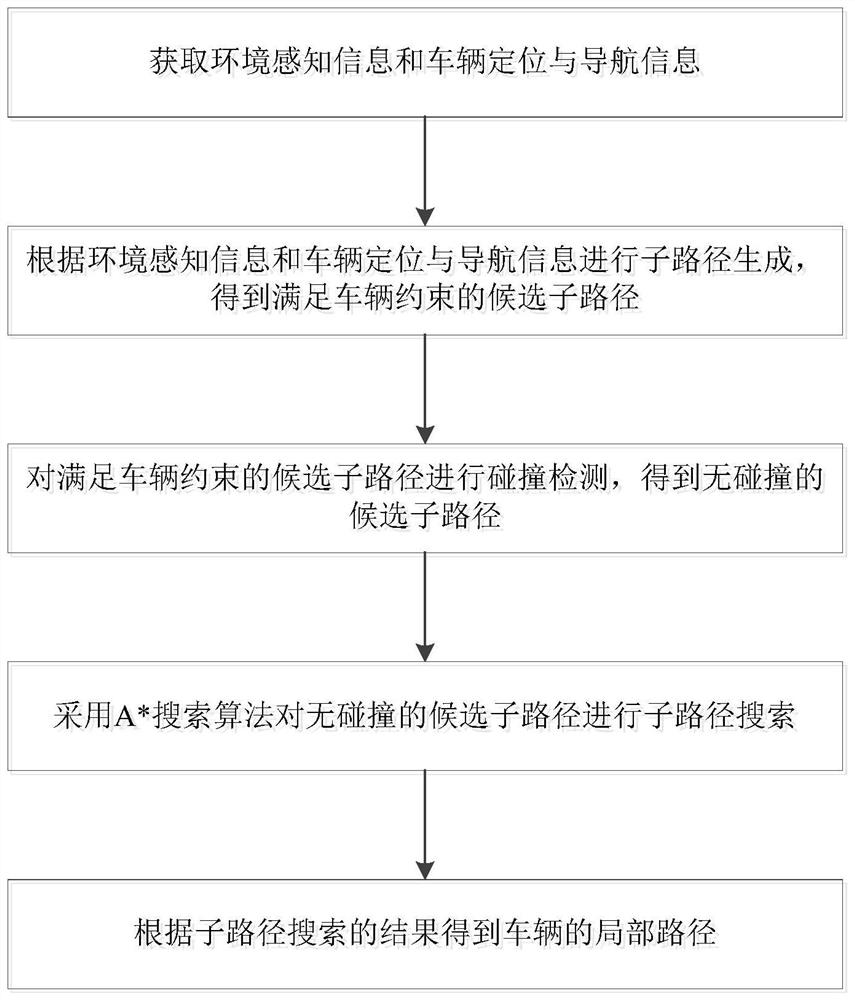
[0138] Aiming at the problems that the existing technology requires large storage space, cannot meet the requirements of vehicle incomplete constraints, and has poor adaptability and scalability, the present invention specially designs a new unmanned driving path planning method and system for the automatic driving system. and device.
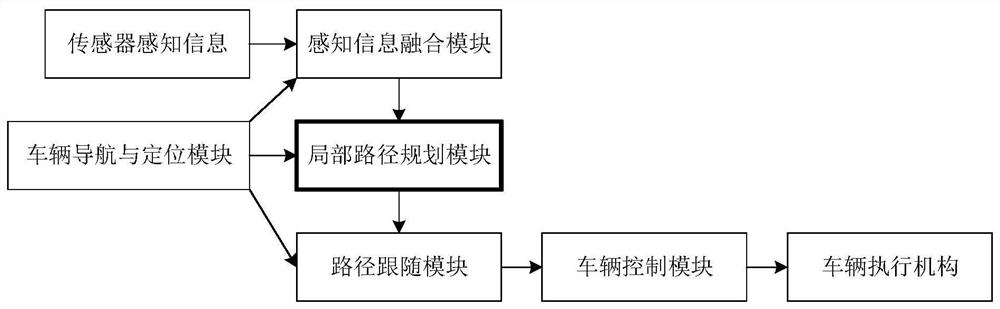
[0139] The block diagram of the automatic driving system of this embodiment is as follows figure 2 As shown, the local path planning module performs local path planning according to the environment model information provided by the perception information fusion module, the vehicle pose information provided by the vehicle navigation and positioning module, and the global route, and outputs the planning results to the path following module. The unmanned driving path planning method of the present invention is mainly realized by the local path planning module, so other modules of the automatic driving system will not be described in detail.
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More