

Unmanned aerial vehicle attitude control method and device, unmanned aerial vehicle and storage medium
A UAV and control law technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as insufficient precision, weak robustness, and insufficient anti-interference ability of UAVs, and achieve Improved robustness and precision, strong stability effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
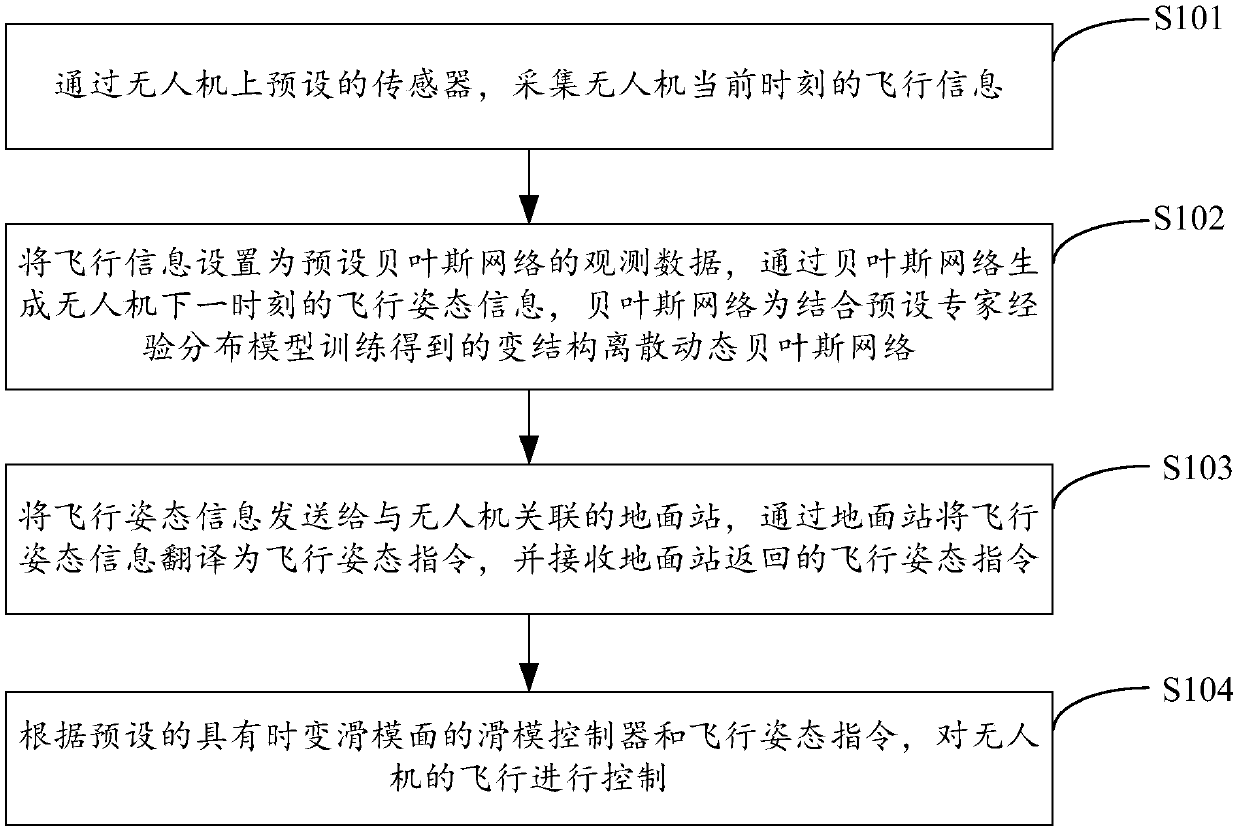
[0026] figure 1 It shows the implementation process of the attitude control method of the UAV provided by the first embodiment of the present invention. For the convenience of explanation, only the parts related to the embodiment of the present invention are shown, and the details are as follows:
[0027] In step S101, the current flight information of the drone is collected through the preset sensors on the drone.
[0028] The invention is applicable to the flight attitude control of the unmanned aerial vehicle in complex dynamic environments (such as disaster relief environments). The current flight information of the drone can be collected through the preset monocular visible light sensor (or multi-eye visible light sensor), infrared light sensor, RGBD sensor, laser rangefinder, barometer, and positioning system on the drone. The flight information may include the UAV's visual information, position, height, and flight attitude, etc., so that the UAV can be controlled to av...
Embodiment 2
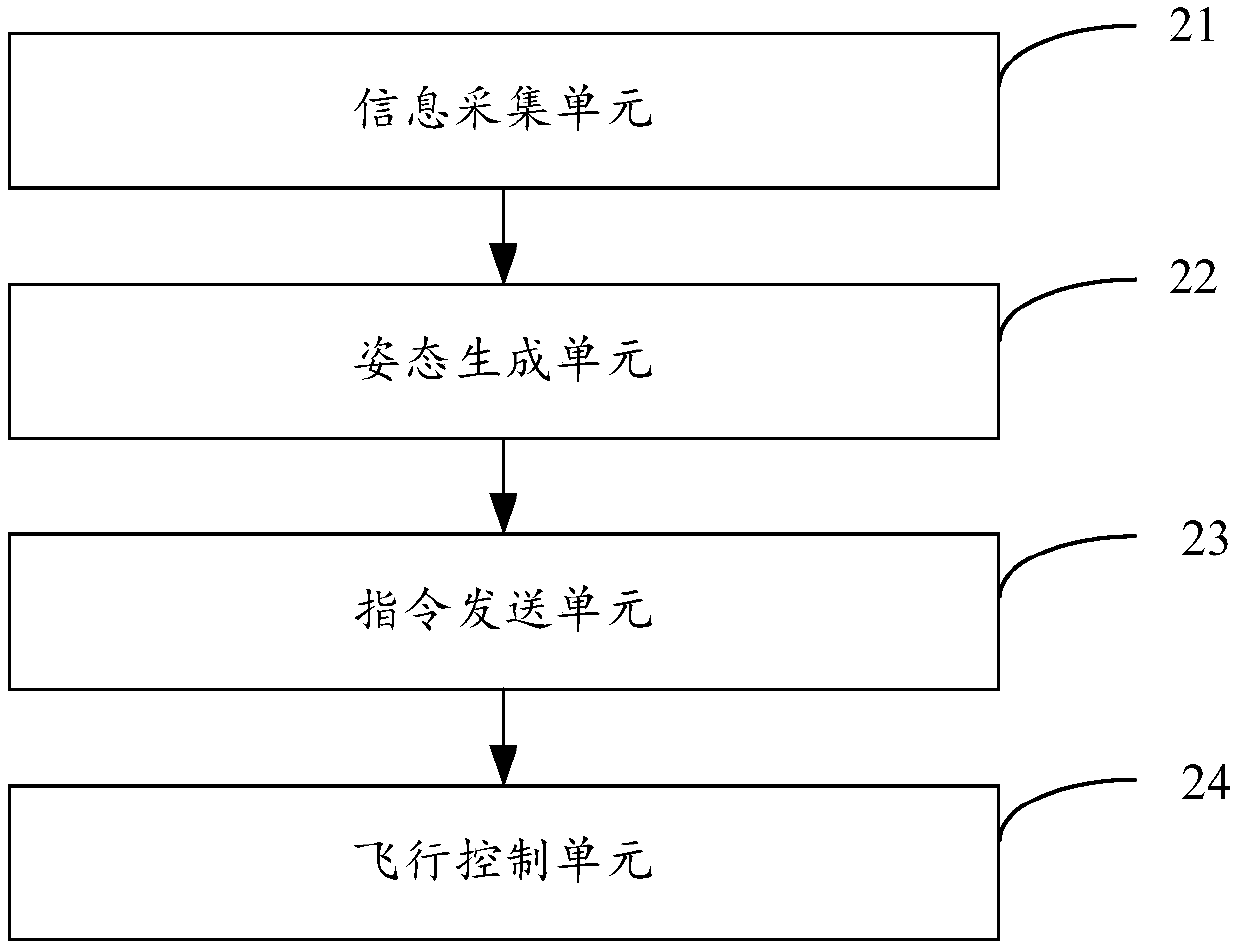
[0057] figure 2 The structure of an attitude control device for an unmanned aerial vehicle provided by Embodiment 2 of the present invention is shown. For the convenience of description, only the parts related to the embodiment of the present invention are shown, including:
[0058] The information collection unit 21 is used to collect the current flight information of the drone through the preset sensors on the drone.
[0059] In the embodiment of the present invention, the unmanned aerial vehicle can be collected through the preset monocular visible light sensor (or multi-eye visible light sensor), infrared light sensor, RGBD sensor, laser range finder, barometer, and positioning system on the drone. The current flight information of the drone can include the visual information, position, height, and flight attitude of the drone, so that the drone can be controlled to avoid obstacles and fly based on the collected flight information.
[0060] The attitude generation unit 2...
Embodiment 3
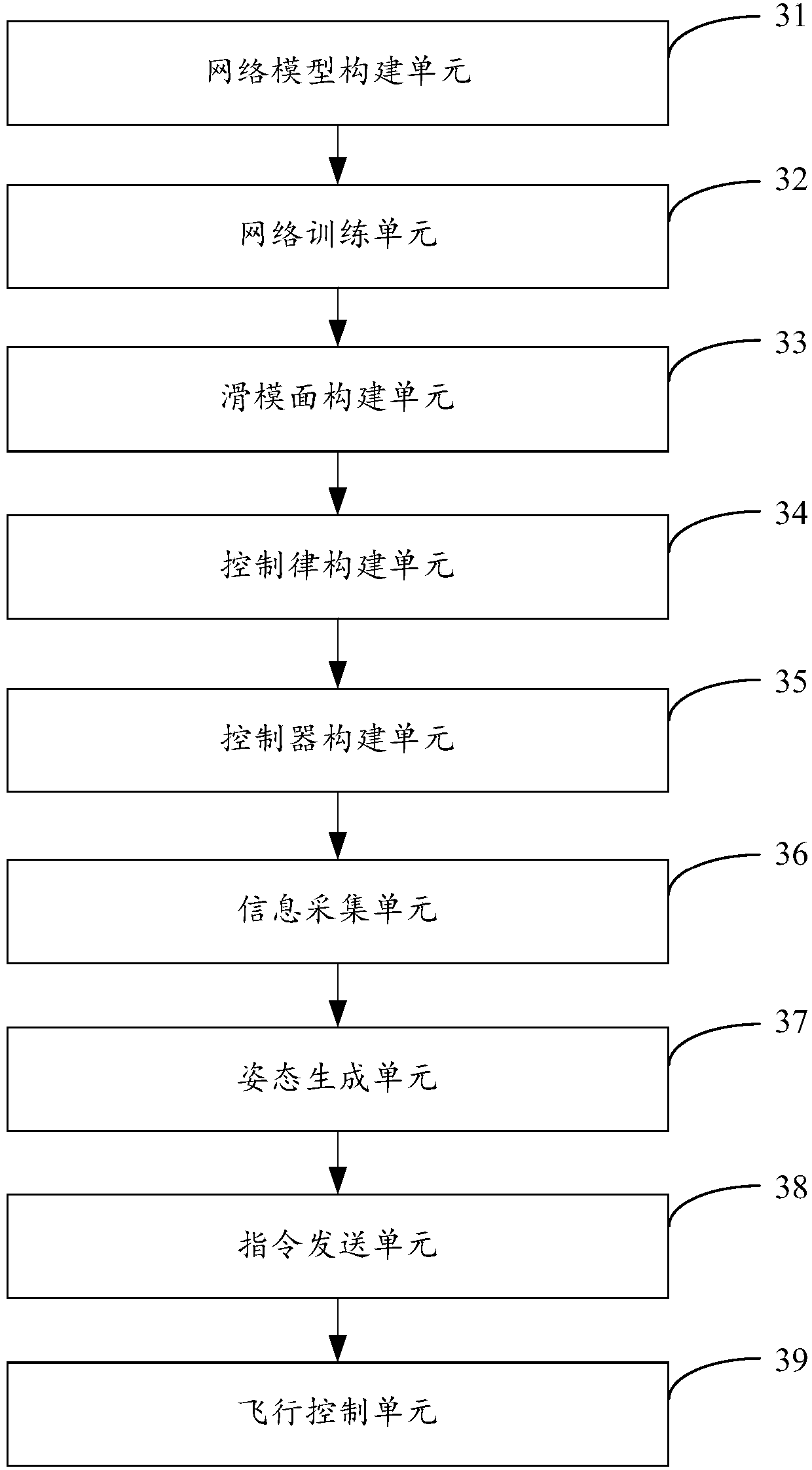
[0069] image 3 The structure of the attitude control device of the UAV provided by the third embodiment of the present invention is shown. For the convenience of description, only the parts related to the embodiment of the present invention are shown, including:
[0070] The network model construction unit 31 is used to collect the sample data of the flight of the drone through the sensors on the drone, and construct an expert experience distribution model and a Bayesian network.
[0071] The network training unit 32 is used to optimize the parameters of the Bayesian network according to the sample data, the expert experience distribution model and the evidence of hidden nodes in the Bayesian network, and generate a trained Bayesian network.
[0072] In the embodiment of the present invention, variable structure discrete dynamic Bayesian network reasoning is to use network model parameters and evidence of observed nodes to calculate the probability of taking values of hidde...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More