

Domestic helping omnidirectional mobile robot
An omnidirectional mobile and robotic technology, applied in the field of household support omnidirectional mobile robots, can solve problems such as health hazards and low mobility of wheelchairs, and achieve the effects of reducing space occupation, increasing knee pad structure, and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
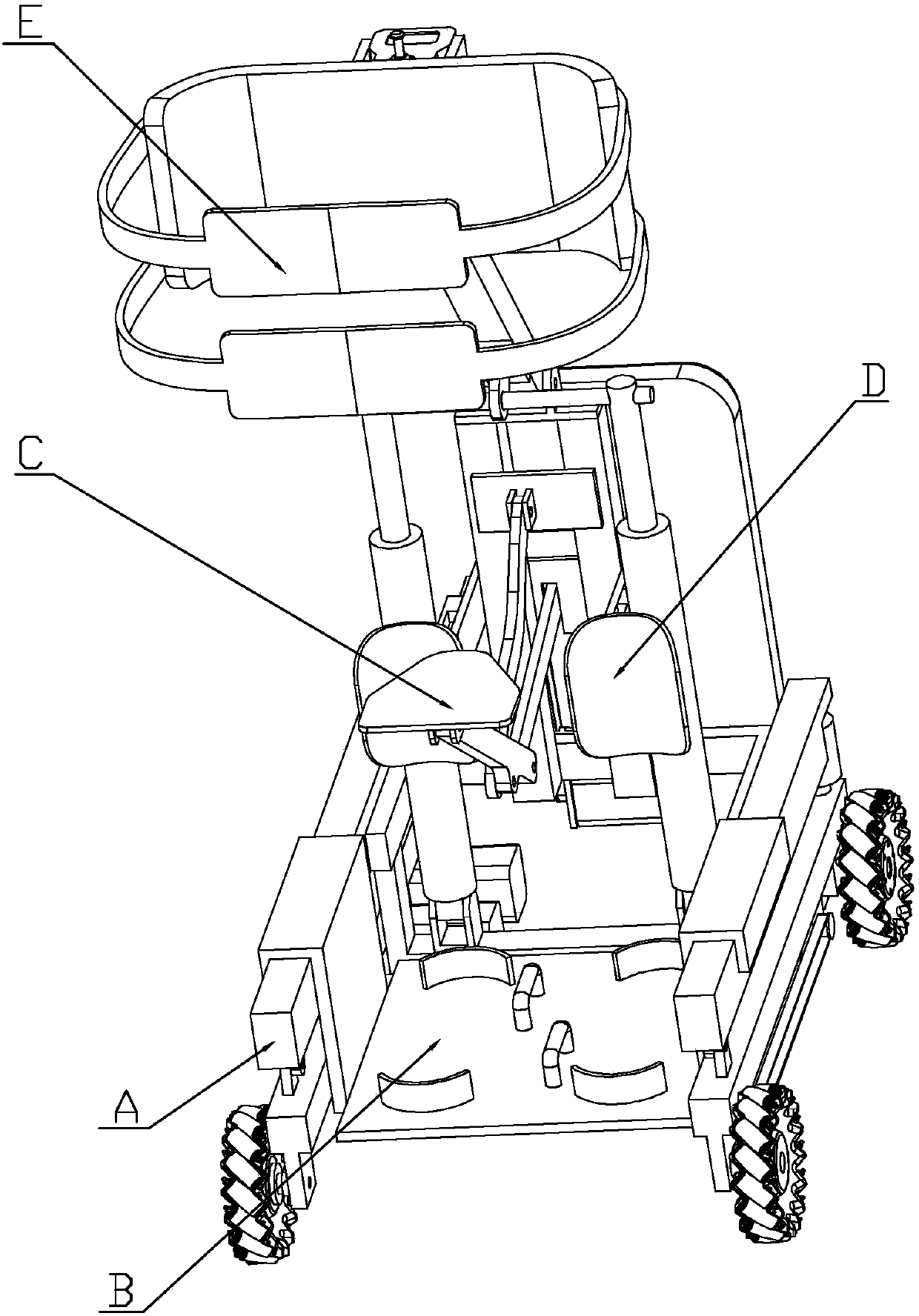
[0027] Specific implementation mode one: combine Figure 1 to Figure 12 To illustrate the present embodiment, the present embodiment includes chassis A, foot support plate B, seat telescopic mechanism C, knee support mechanism D and chest support mechanism E,
[0028] Two mecanum wheels 2 are respectively arranged on the front and rear sides of the chassis A, and each mecanum wheel 2 is driven by a motor reducer I3,
[0029] The foot support plate B is arranged on the chassis A,
[0030] Seat retractable mechanism C comprises seat 15, long connecting rod 16, bent connecting rod 17, short connecting rod 18 and column 19, and one end of long connecting rod 16 is affixed together with the bottom of seat 15, and column 19 front and rear sides Respectively be provided with hinged plate, short connecting rod 18 two ends are respectively hinged with the hinged plate on one side of column 19 and the other end of long connecting rod 16, and the two ends of curved connecting rod 17 are...
specific Embodiment approach 2
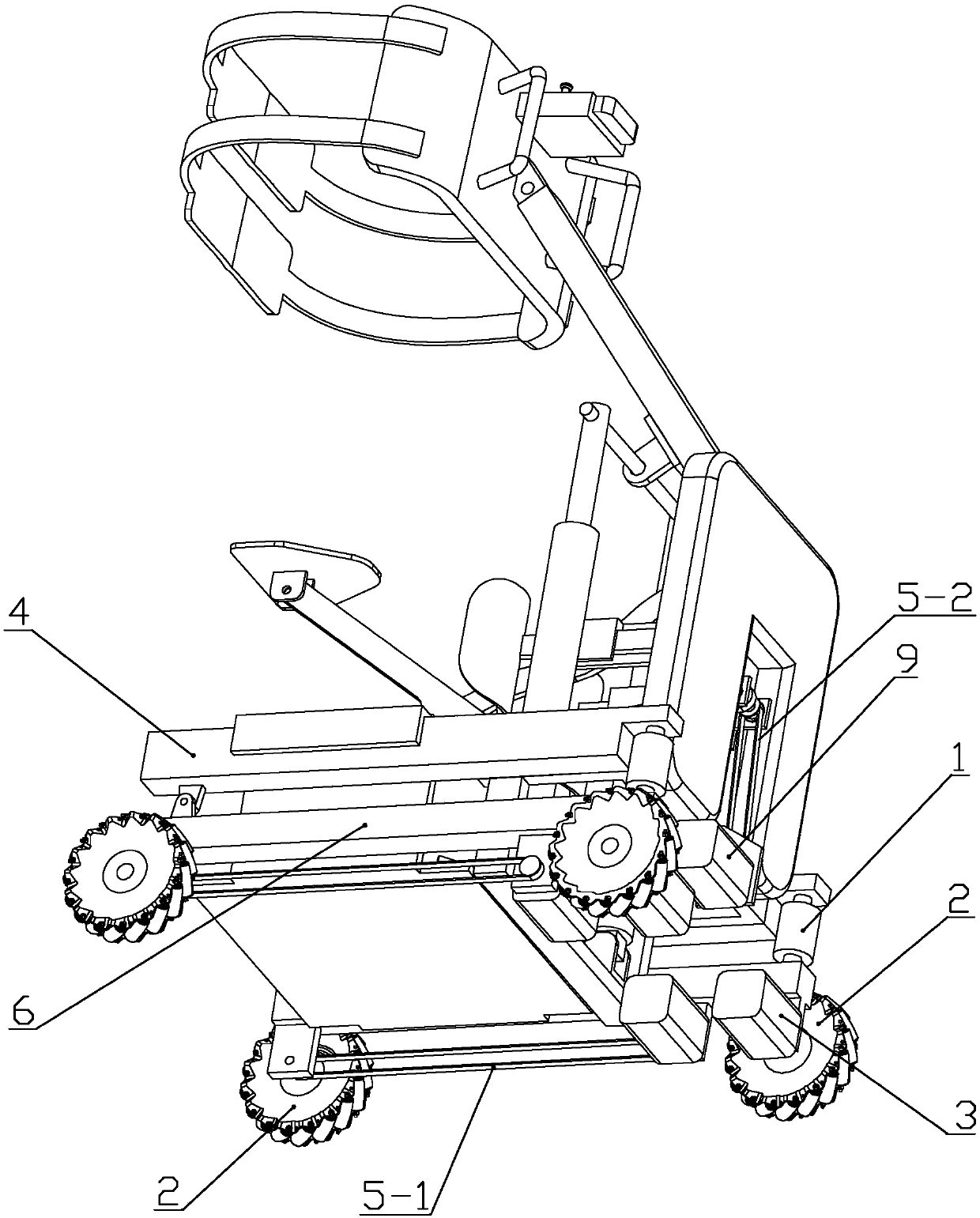
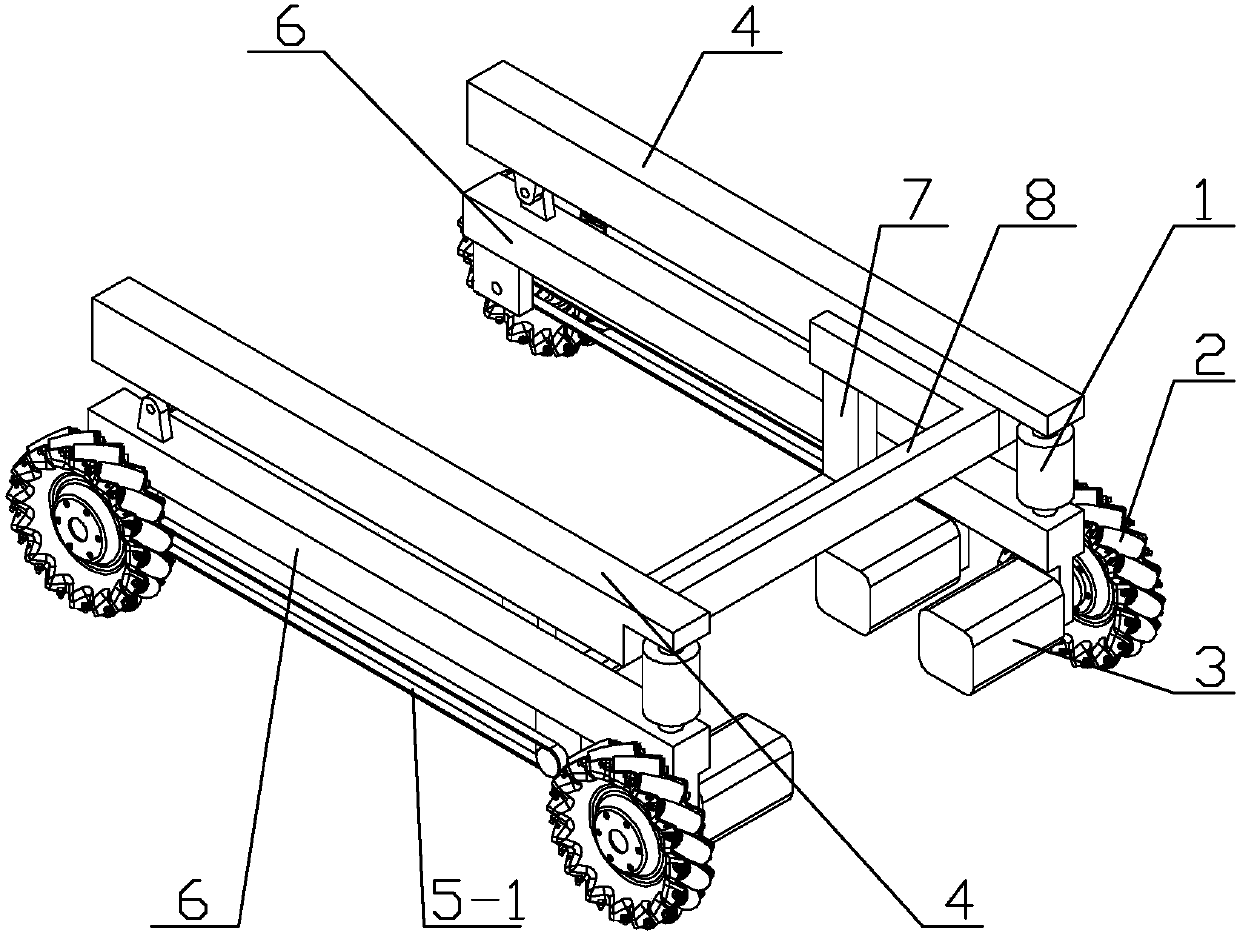
[0033] Specific implementation mode two: combination image 3 To illustrate this embodiment, the chassis A of this embodiment includes an upper beam 8, a lower beam 7, two lower rods 6 and two upper rods 4,
[0034] The upper beam 8 and the lower beam 7 are fixed together, the upper beam 8 is provided with a control box 24, two upper long rods 4 and two lower long rods 6 are symmetrically arranged on both sides of the upper beam 8, and the two upper long rods 4 Respectively fixed together with the upper beam 8, one end of each lower long bar 6 is hinged with one end of each upper long bar 4 respectively, the other end of each lower long bar 6 and the other end of each upper long bar 4 A damping spring 1 is arranged between them, and a mecanum wheel 2 is respectively arranged at both ends of each lower long rod 6,
[0035] The Mecanum wheel 2 arranged adjacent to the shock absorbing spring 1 is directly connected to the motor reducer I3, and the Mecanum wheel 2 arranged adjace...
specific Embodiment approach 3
[0036] Specific implementation mode three: combination Figure 4 To illustrate this embodiment, the sole support plate B of this embodiment includes a load-bearing plate 14, a U-shaped handle I13 and two pairs of foot fixing brackets 12, the load-bearing plate 14 is a square, and the two pairs of foot fixing brackets 12 are arranged side by side on the load-bearing plate 14 Two U-shaped handles I13 are provided on the upper surface of the load-bearing plate 14, and two symmetrical hook-shaped hanging plates 11 are affixed to both sides of the load-bearing plate 14, and the hanging plates 11 on both sides of the load-bearing plate 14 are respectively connected to the two 4 fastenings on the upper pole.
[0037] Preferably, the foot fixing brackets 12 are arc-shaped plates, and the concave surfaces of each pair of the foot fixing brackets 12 are arranged opposite to the concave surfaces.
[0038] In this embodiment, the foot support B is removed to switch to the training mode, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More