

Mechanical arm gravity compensated cam tension spring mechanism
A technology of gravity compensation and mechanical arm, which is applied in the field of cam tension spring mechanism for gravity compensation of mechanical arm, can solve the problems of increased cost and overall structural size of the mechanical arm, and achieves a small space occupation, compact structure and simple structure. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
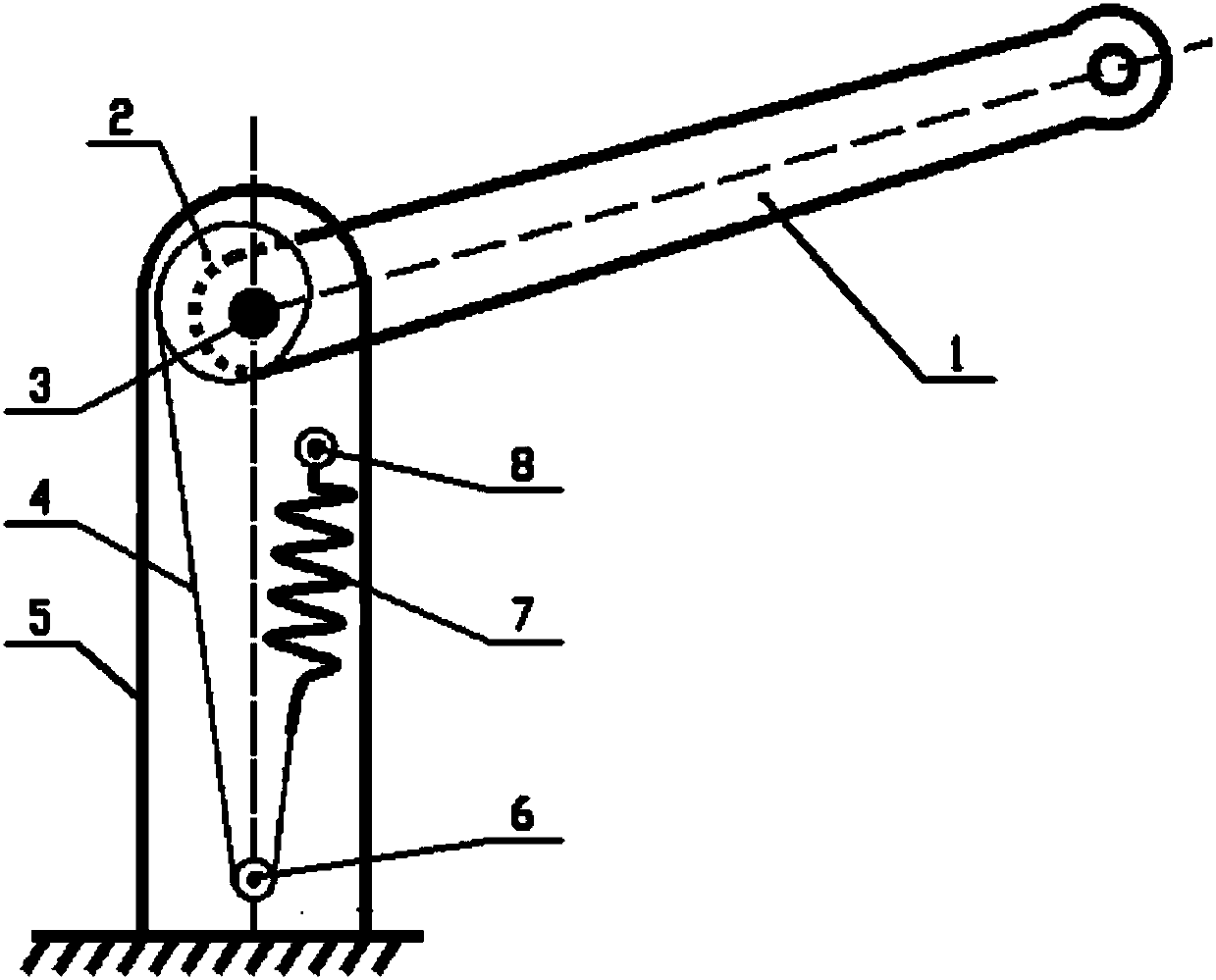
[0027] A cam tension spring mechanism for gravity compensation of a mechanical arm, its structure is as follows figure 1 As shown, it includes a mechanical upper arm 1, a mechanical lower arm 5, a disc cam 2, a pulley 6, a fixed pin 8, a wire rope 4 and an extension spring unit, and the mechanical upper arm 1 is arranged on the upper part of the mechanical lower arm 5 through joint hinge 3 rotation, and can be Rotate around the rotation center of the joint hinge 3, the disc cam 2 is fixedly connected with the mechanical upper arm 1, and rotates with the mechanical upper arm 1, after one end of the steel wire rope 4 is fixed with the disc cam 2, it is guided by the pulley 6 and then connected with the extension spring unit, Pulley 6 and the center of mechanical upper arm 1 rotating around mechanical lower arm 5 are located on the same vertical line, and extension spring 7 adopts fixed pin 8 fixedly connected with its end to be installed on mechanical lower arm 5 .
[0028] When...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More