

System state estimation method based on state augmentation iterated extended Kalman filter
An extended Kalman and system state technology, applied in the field of communication, can solve the problems of reducing filtering accuracy, system state and measurement noise no longer satisfy the mutual orthogonal relationship, and achieve the effect of high filtering accuracy and fast convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] In the following description, numerous specific details are set forth in order to provide a thorough understanding of the present invention. However, the present invention can be implemented in many other ways different from those described here, and those skilled in the art can make similar extensions without violating the connotation of the present invention, so the present invention is not limited by the specific implementations disclosed below.
[0012] Secondly, the present invention is described in detail by means of schematic diagrams. When describing the embodiments of the present invention in detail, for convenience of explanation, the schematic diagrams are only examples, which should not limit the protection scope of the present invention.
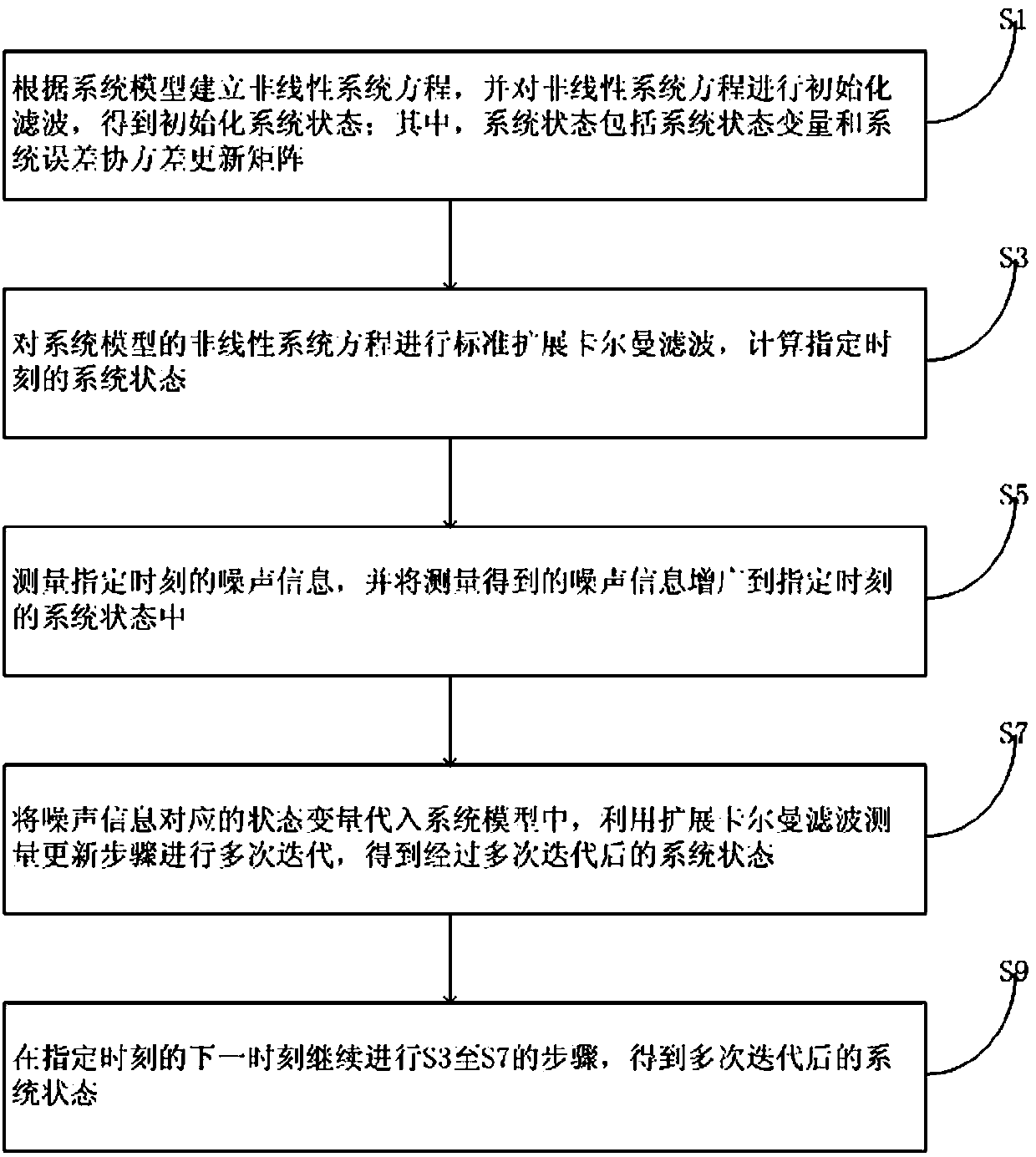
[0013] refer to figure 1 , figure 1 It is a schematic flowchart of a system state estimation method based on the state augmentation iterative extended Kalman filter algorithm provided by the present invention.
[0014] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More