

A time-varying convex quadratic programming solver design method
A technique of convex quadratic programming and quadratic programming, which is applied in the field of time-varying quadratic programming problem solvers in the real number domain, and can solve problems such as unreasonable and difficult to satisfy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
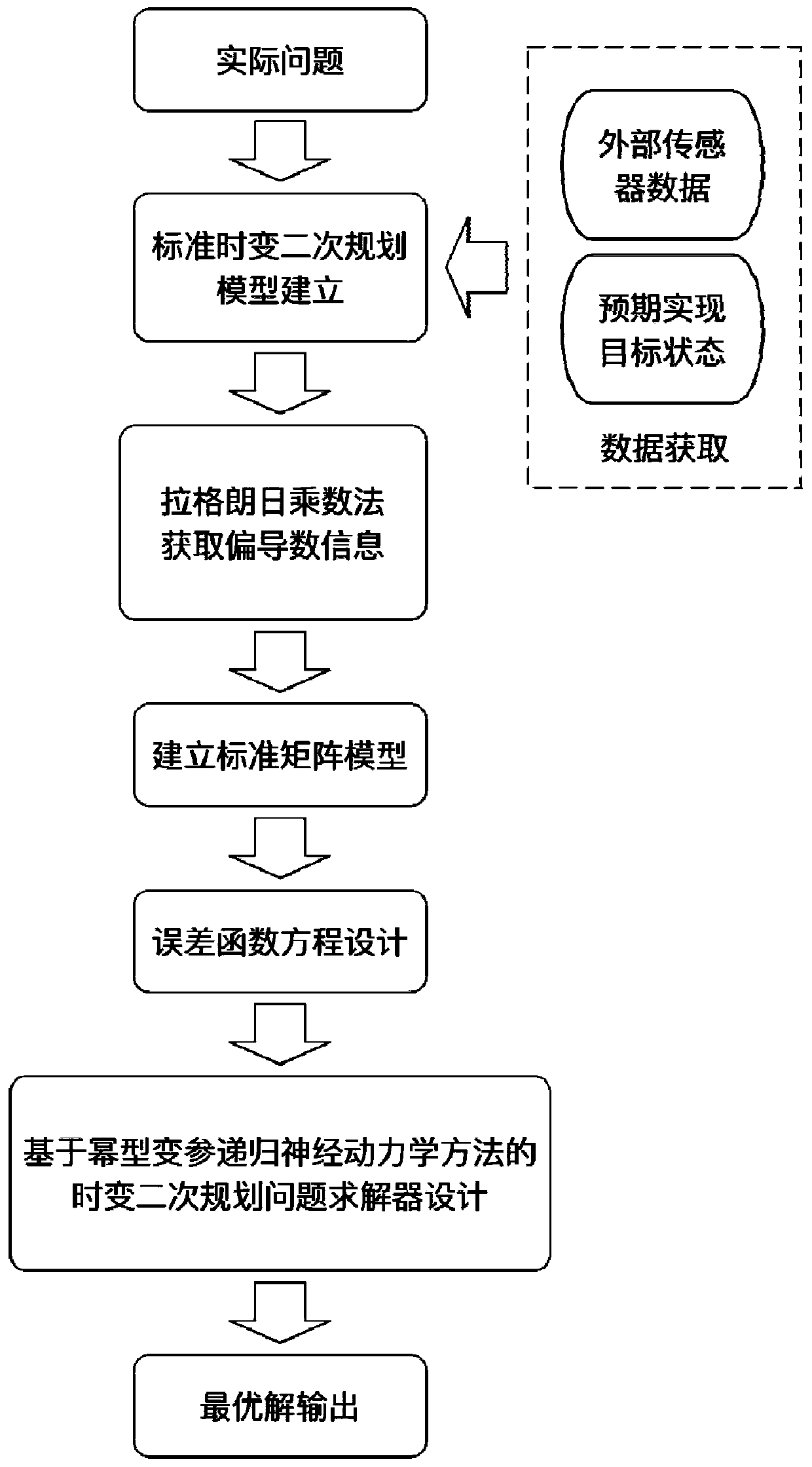
[0075] Such as figure 1 Shown is a flow chart of a time-varying convex quadratic programming solver design method of an example of the present invention; a design of a time-varying convex quadratic programming solver design method comprises the steps:
[0076] 1) Standardize the actual physical system or numerical solution in the form of a time-varying quadratic programming problem through mathematical modeling methods, and establish a standard quadratic programming problem model for the system;
[0077] 2) According to the Lagrangian multiplier method, respectively obtain the partial derivative information about the optimal solution and the Lagrange multiplier of the standard time-varying quadratic programming problem in step 1), and write the Lagrangian optimization formula;
[0078] 3) Transform the partial derivative information about the optimal solution and the Lagrange multiplier in step 2) into a standard time-varying matrix form, and write the time-varying matrix equa...
Embodiment 2
[0136] In order to demonstrate the actual system design process, an example is used to illustrate the problem: Assume that the time-varying parameter matrix of the system has been obtained, and consider a time-varying quadratic programming problem model in the real number domain with the following time-varying matrix
[0137]
[0138] subject to A(t)x(t)=B(t) (12)
[0139] in
[0140]
[0141] A(t):=[sin 2t cos2t], B(t):=cos3t, x(t):=[x 1 (t)x 2 (t)] T
[0142] According to formula (6), the above quadratic programming problem models (11)-(12) can be written in the following matrix equation form
[0143] W(t)Y(t)=G(t) (13)
[0144] in
[0145]
[0146] Y(t):=[x 1 (t) x 2 (t) λ(t)] T , G(t):=[-sin t -cos tcos 3t] T
[0147] According to the following implicit kinetic equation expression
[0148]
[0149] and to Definition
[0150] Y(t):=[x T (t),λ T (t)] T =[x 1 (t), x 2 (t),...,x n (t),λ 1 (t),λ 2 (t),...,λ m (t)] T (15)
[0151]The system ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More