Self-adaptive super-twisting sliding mode control method for realizing micro gyroscope with adjustable gain
A technology of micro gyroscope and control method, which is applied in the direction of adaptive control, general control system, control/adjustment system, etc., and can solve the problem of gyroscope system sensitivity and precision reduction, original part characteristics and design differences, and design principle process processing precision limitation And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0073] The present invention will be further described below. The following examples are only used to illustrate the technical solution of the present invention more clearly, but not to limit the protection scope of the present invention.
[0074] 1. Mathematical model of micro-gyroscope:
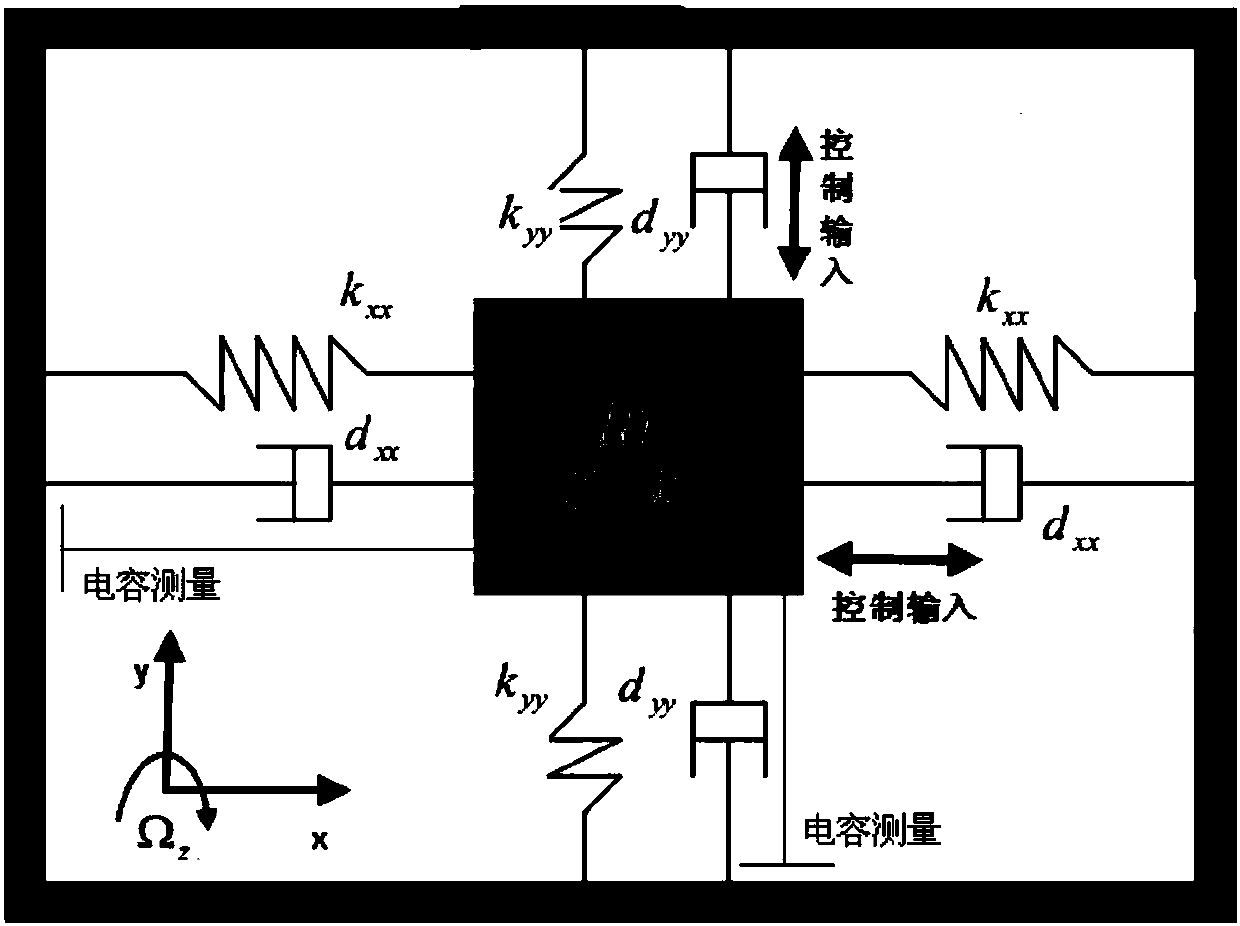
[0075] A micro-vibration gyroscope usually consists of three parts: a mass suspended by an elastic material support, an electrostatic drive device, and a sensing device. This can be simplified as figure 1 A damped oscillatory system consisting of a mass and a spring is shown, which shows a simplified z-axis micromechanical vibratory gyroscope model in Cartesian coordinates.
[0076] According to Newton's law in the rotating system, comprehensively considering the influence of various manufacturing errors on the micro-gyroscope, and then through the dimensionless processing of the micro-gyroscope, the mathematical model of the micro-gyroscope is finally obtained as follows:
[0077]
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com