

Precision stop method for D-series high-speed trains
An EMU and precise technology, applied in the direction of instruments, adaptive control, control/regulation systems, etc., can solve problems such as input time lag
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0146] The precise parking algorithm is to establish a suitable braking mathematical model, design a tracking controller with high control precision and good robustness, and realize precise tracking of the target braking curve. The higher the tracking accuracy of the target braking curve, the higher the parking accuracy . In addition, the resistance from the air and lines during the braking process is an uncertain disturbance, which affects the parking accuracy and comfort. The anti-interference ability of the algorithm can ensure the comfort and accuracy of parking.
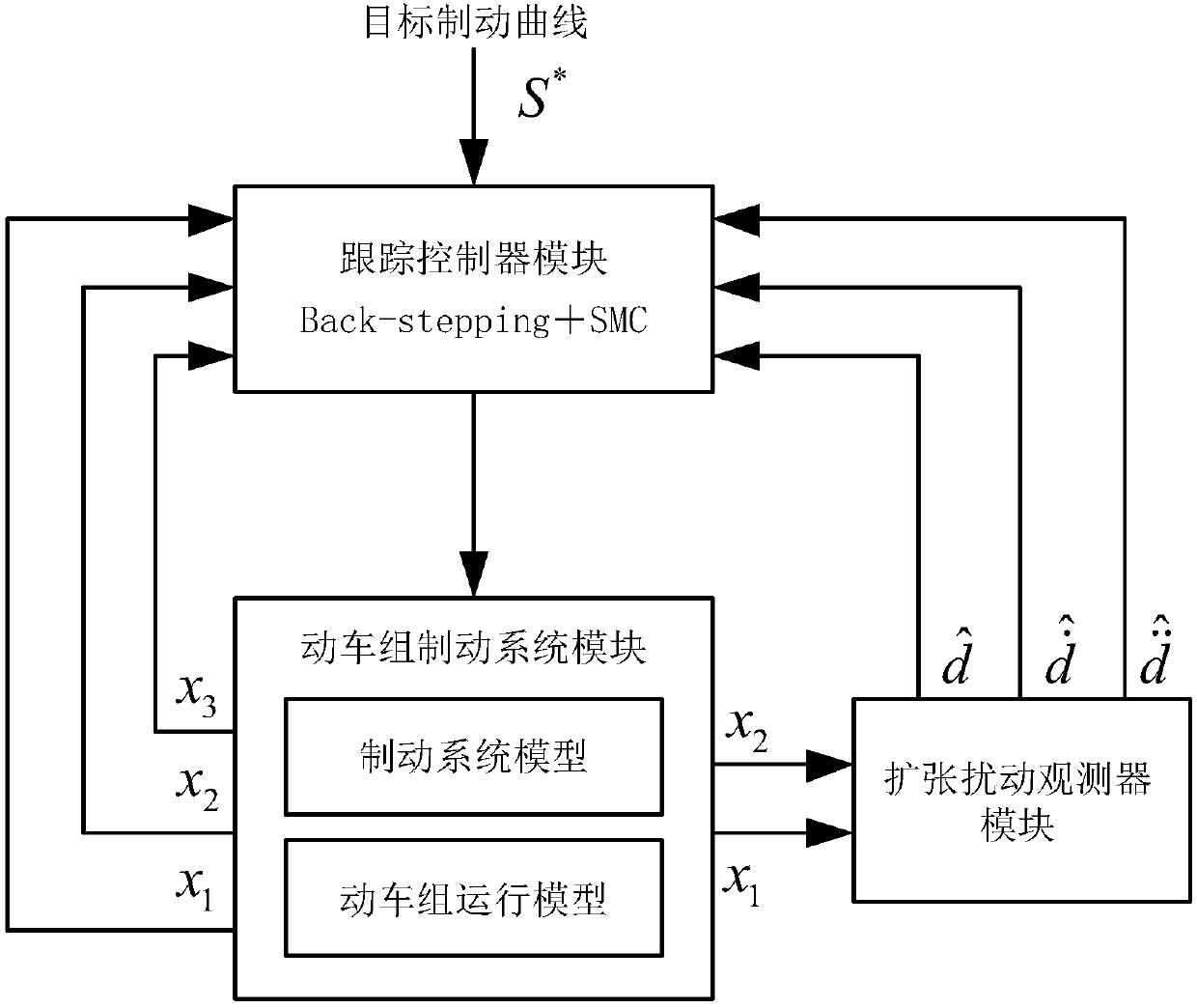
[0147] The inversion sliding mode precise parking algorithm method for EMUs with input and input time lags comprises the following steps:
[0148] The first step. The establishment of the mathematical model of the brake system with hysteresis at input time is to obtain the operation object of the later algorithm. In the simulation, we need to use the mathematical model as the application object of the algorithm...
Embodiment 2
[0272] The operation and braking of the EMU is a complex time-delay nonlinear system, but the modeling mechanism for different types of EMUs in the experiment is the same, the difference is the running resistance and the different belts of the braking device. come parameter differences.
[0273] In the following, select the running resistance formula, input the system equation with the delay time as τ=1.2s and the system response time as T=0.4s:
[0274]d(t)=w(t)+2.09+0.039v+0.000675v 2
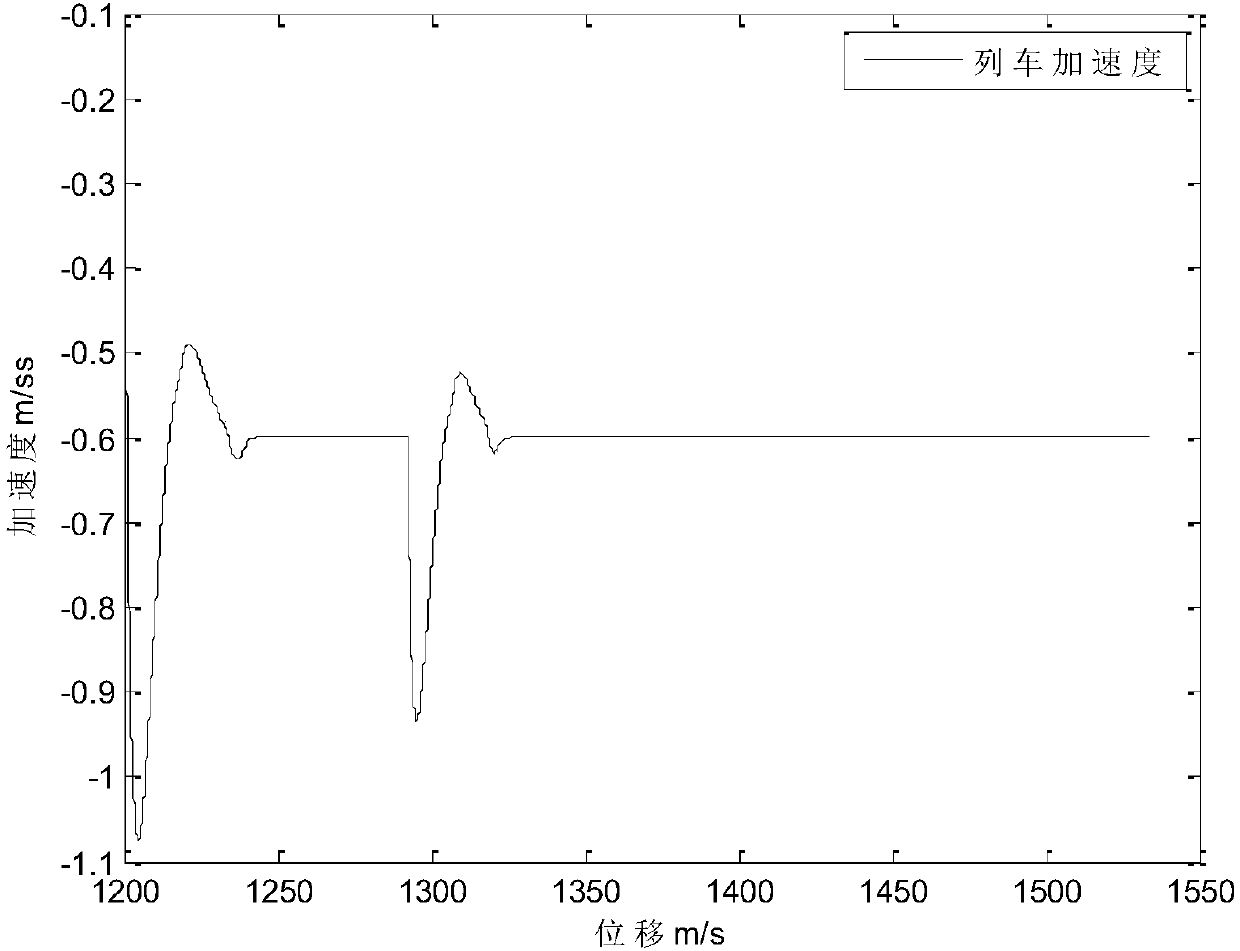
[0275] w(t) is the additional resistance added to the line during the parking process. The simulated line environment of this braking example is: when the braking reaches 1300 meters, add a ramp with a slope of 0.28, a turn with a radius of 600 meters, and a tunnel with a length of 10 meters. These three lines add resistance. The specific expressions and parameter settings are as follows:
[0276]
[0277] In the formula, θ is the thousandth fraction of the road slope, take θ=28; R is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More