Layering singularity avoidance method of remotely operating mechanical arm
A robotic arm and singularity avoidance technology, applied in the sequence/logic controller in the direction of program control, electrical program control, etc., can solve problems such as the inability to effectively ensure the normal motion trajectory and singularity avoidance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] Combine below Figure 1 to Figure 6 This embodiment is described in detail:
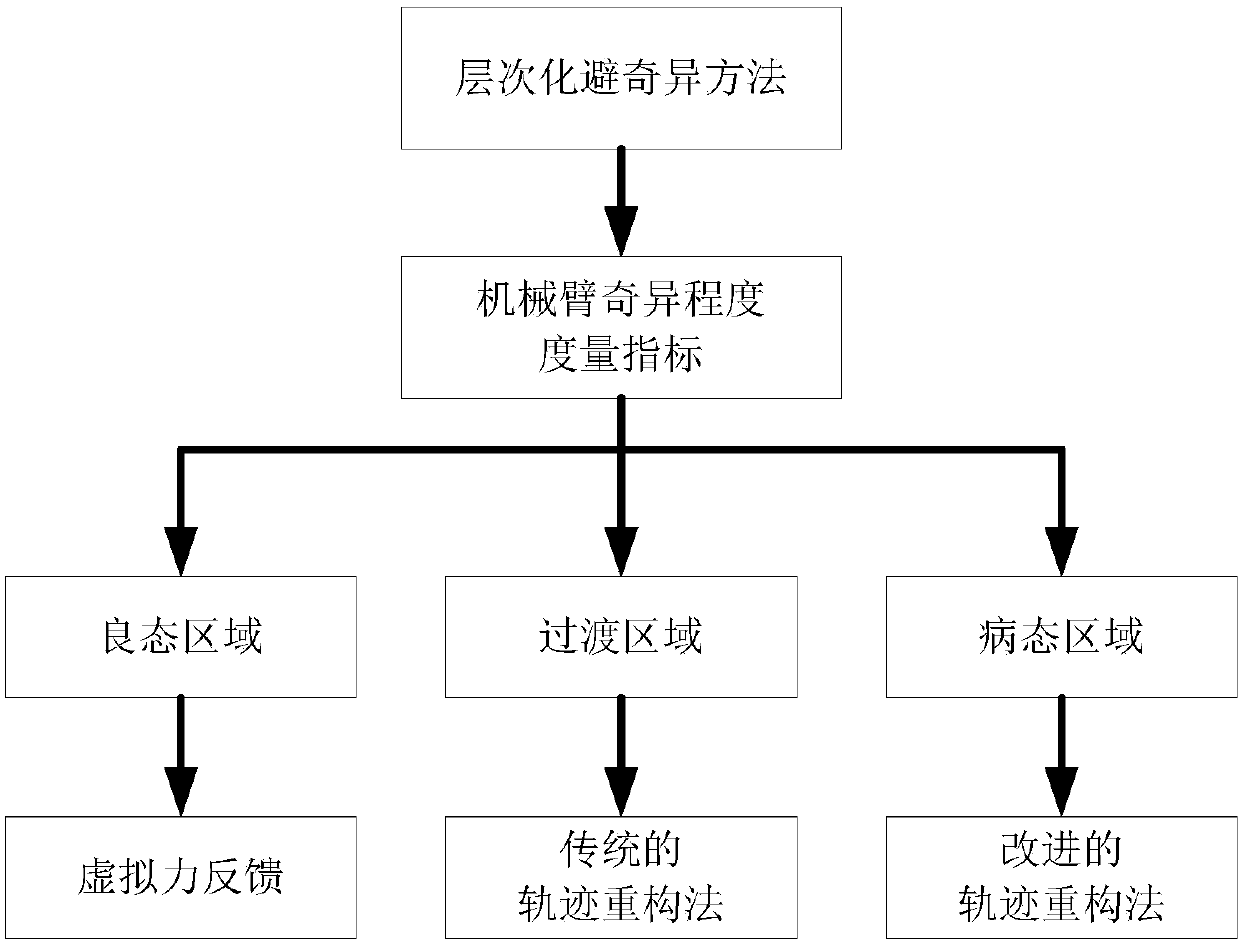
[0019] combine figure 1 As shown, the hierarchical method for avoiding singularities of the teleoperated manipulator described in this embodiment comprises the following steps:
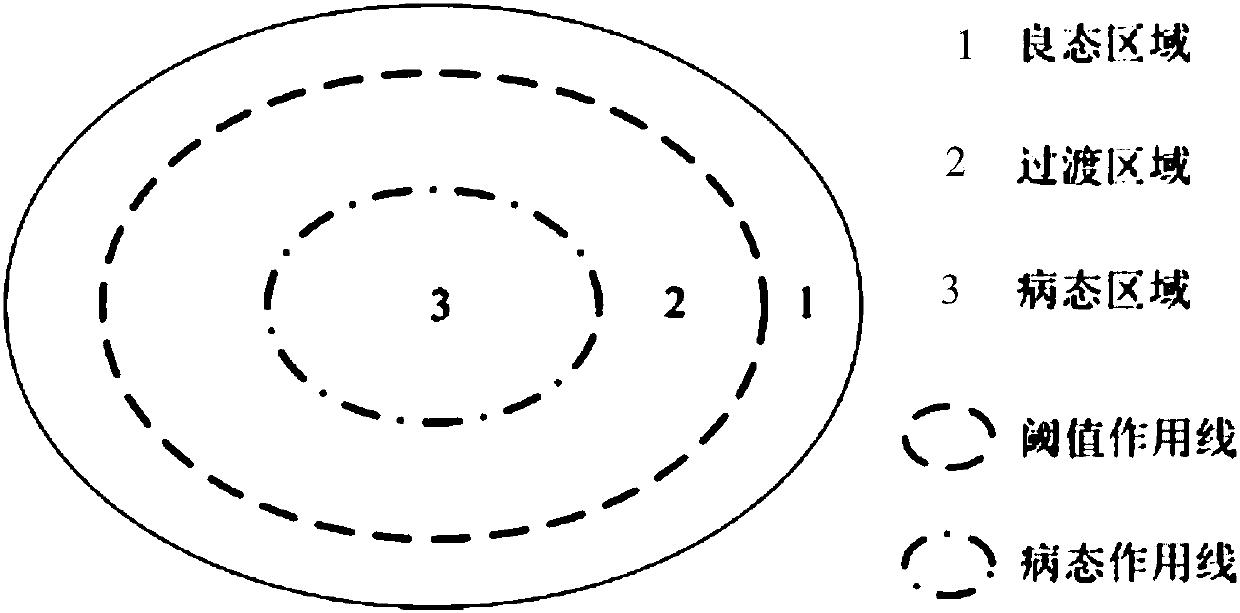
[0020] According to the local condition sequence of the singularity degree measurement index of the manipulator, the singularity avoidance layer of the operating state of the manipulator is divided into a healthy state area, a transitional area and a pathological area;
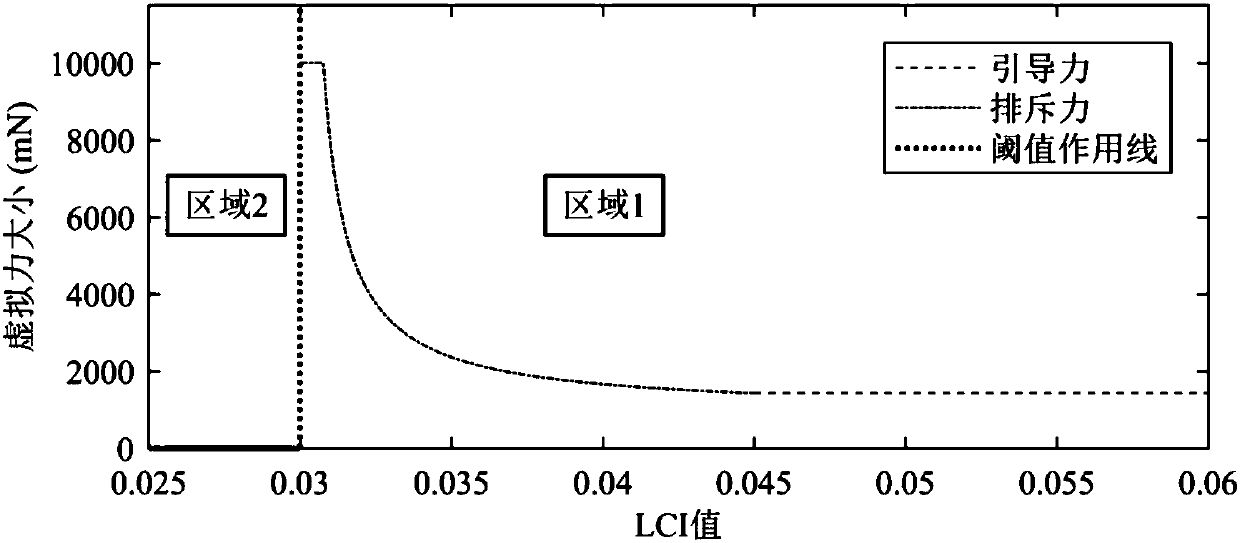
[0021] When the robotic arm is running in a good state area, the movement of the operator at the main end is guided by virtual force feedback;
[0022] When the manipulator is running in the transition area, the traditional trajectory reconstruction method is used to reconstruct the end trajectory of the manipulator;
[0023] When the manipulator is running in the sick area, the trajectory of the end of the manipulator is reconstructed by the impro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More