

Pseudo-measurement-based asynchronous track fusion algorithm with feedback maneuvering target
A technology for maneuvering target and track fusion, applied in computing, special data processing applications, instruments, etc., can solve the problems of high sensor requirements and difficult application in practice, and achieve the effect of excellent tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
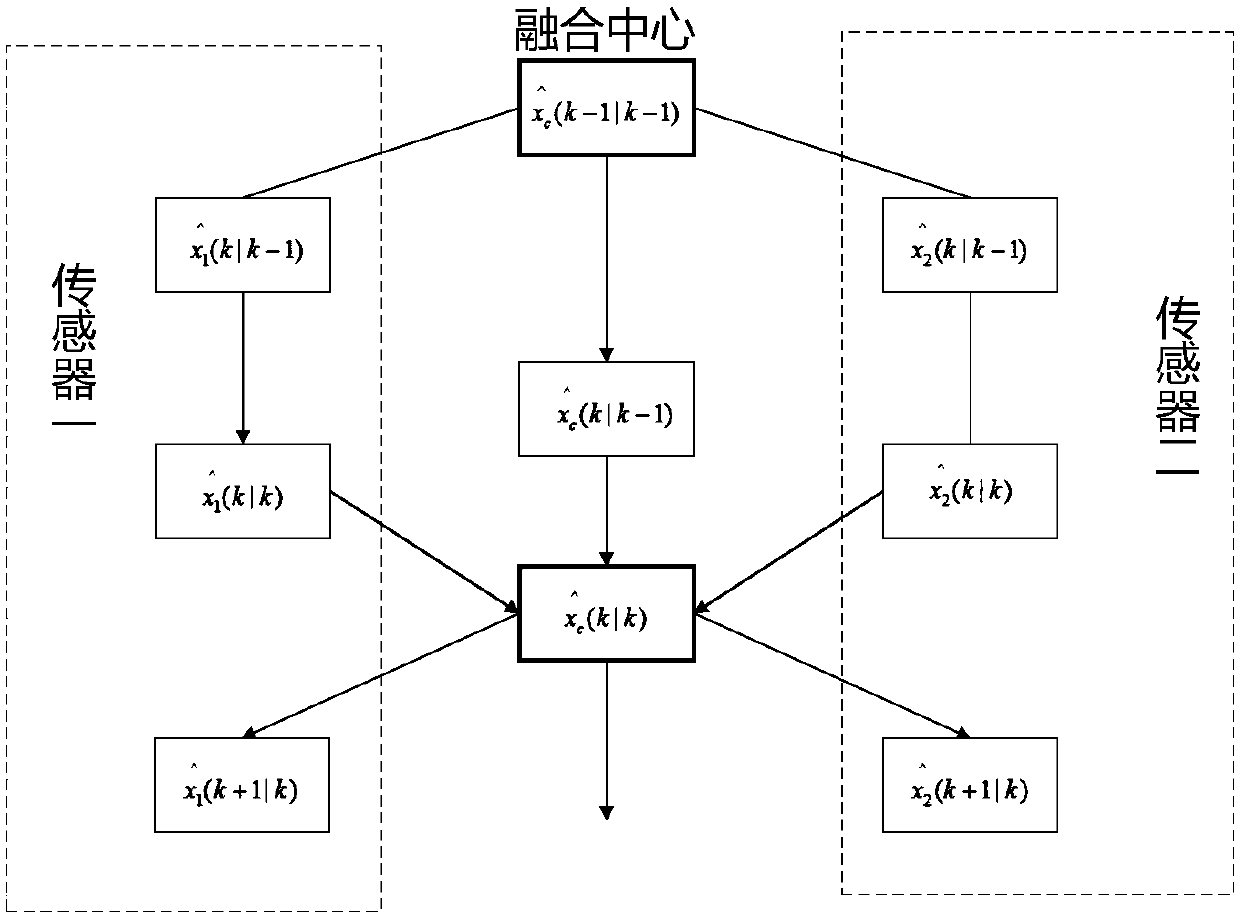
[0027] In the distributed fusion infrastructure, the sensors independently filter to generate local tracks, and the fusion center performs fusion after obtaining the tracks. According to whether the fusion center uses the fusion result of the previous fusion time and whether the fusion center feeds back data to the sensor end, the distributed The formula fusion structure is divided into four types: no track memory and no feedback, no track memory and feedback, track memory and no feedback, and track memory and feedback. The essence is to use the previous moment The fusion track information of the sensor can improve the fusion accuracy, and the use of the fusion structure with feedback information can improve the local track accuracy of the sensor. The present invention improves the overall accuracy of the algorithm by introducing a fusion structure with feedback, so that it can achieve better results in multi-sensor maneuvering target tracking. The central filter obtains the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More