

Method for planning shortest path of agricultural machinery based on Dijkstra algorithm
A shortest path, agricultural machinery technology, applied in directions such as navigation calculation tools to reduce search time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention can be explained in detail through the following examples, and the purpose of disclosing the present invention is to protect all technical improvements within the scope of the present invention.
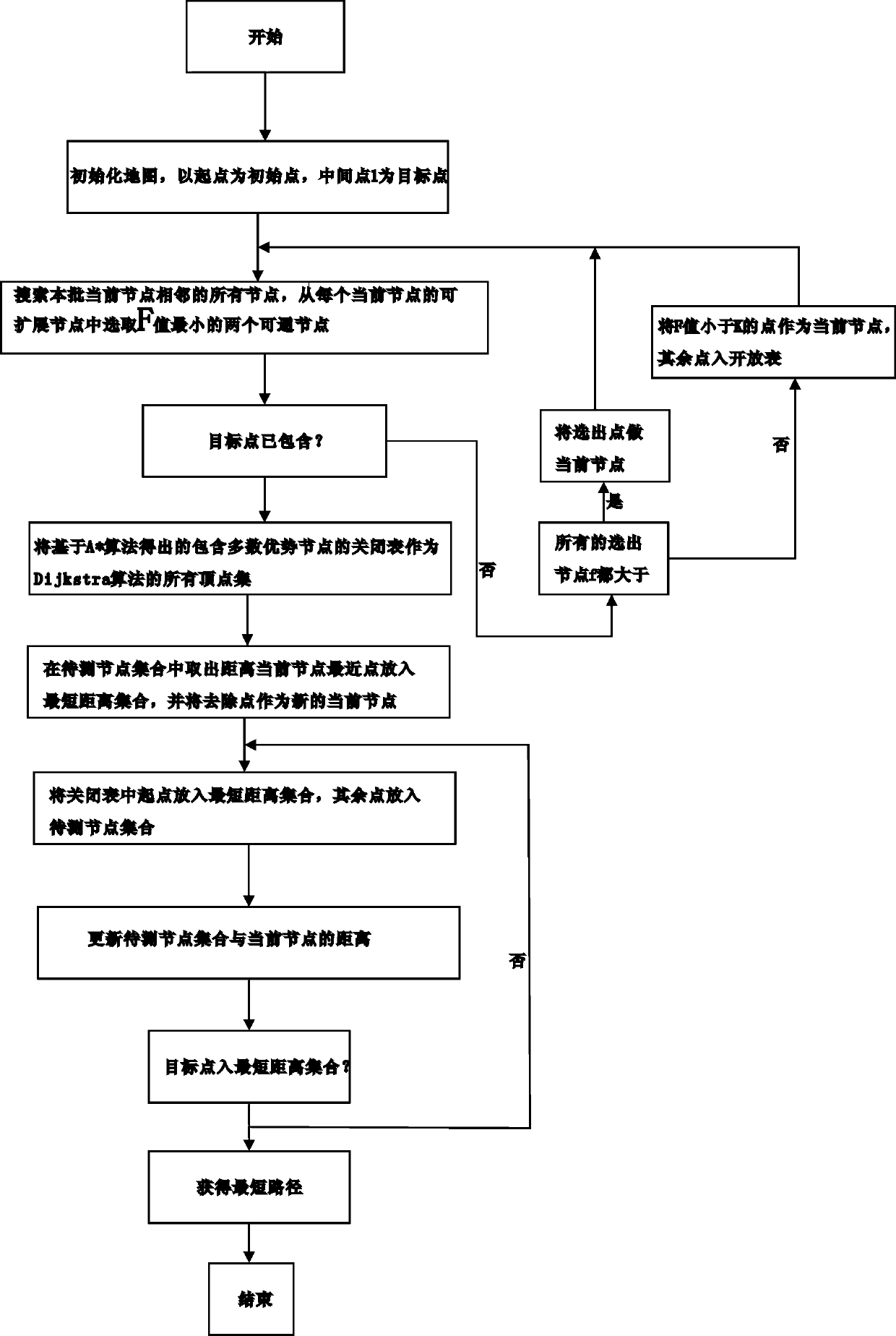
[0023] combined with figure 1 In the method for planning the shortest path of agricultural machinery based on the Dijkstra algorithm, the application object of the present invention is agricultural machinery. First, a grid map is constructed in the operation area of the farmland, and the operation area of the agricultural machinery is divided into blocks in the form of a grid map. The grid width is divided according to the width of the vehicle body. According to the accuracy requirements and actual needs, the width of the body is made to be an odd multiple (2i+1) of the grid width, and i is a non-negative integer; according to the obstacle distribution of the UAV aerial survey and sensor feedback, the grid map can be divided into For safety reasons,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More