

Deformed robot
A robot and motor technology, applied in entertainment, toys, etc., can solve the problems of remote control ball deformation, damage, robot damage, etc., and achieve the effect of small size and easy portability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
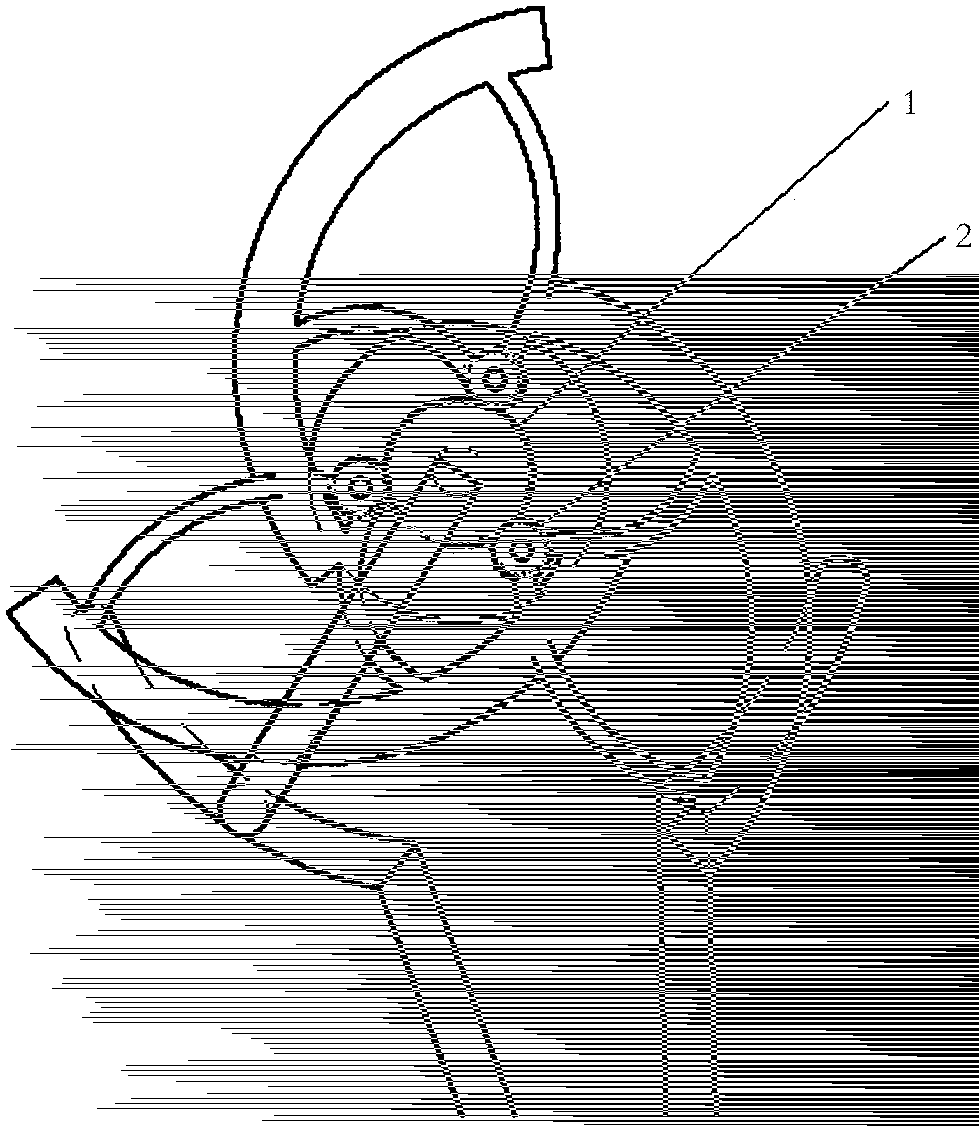
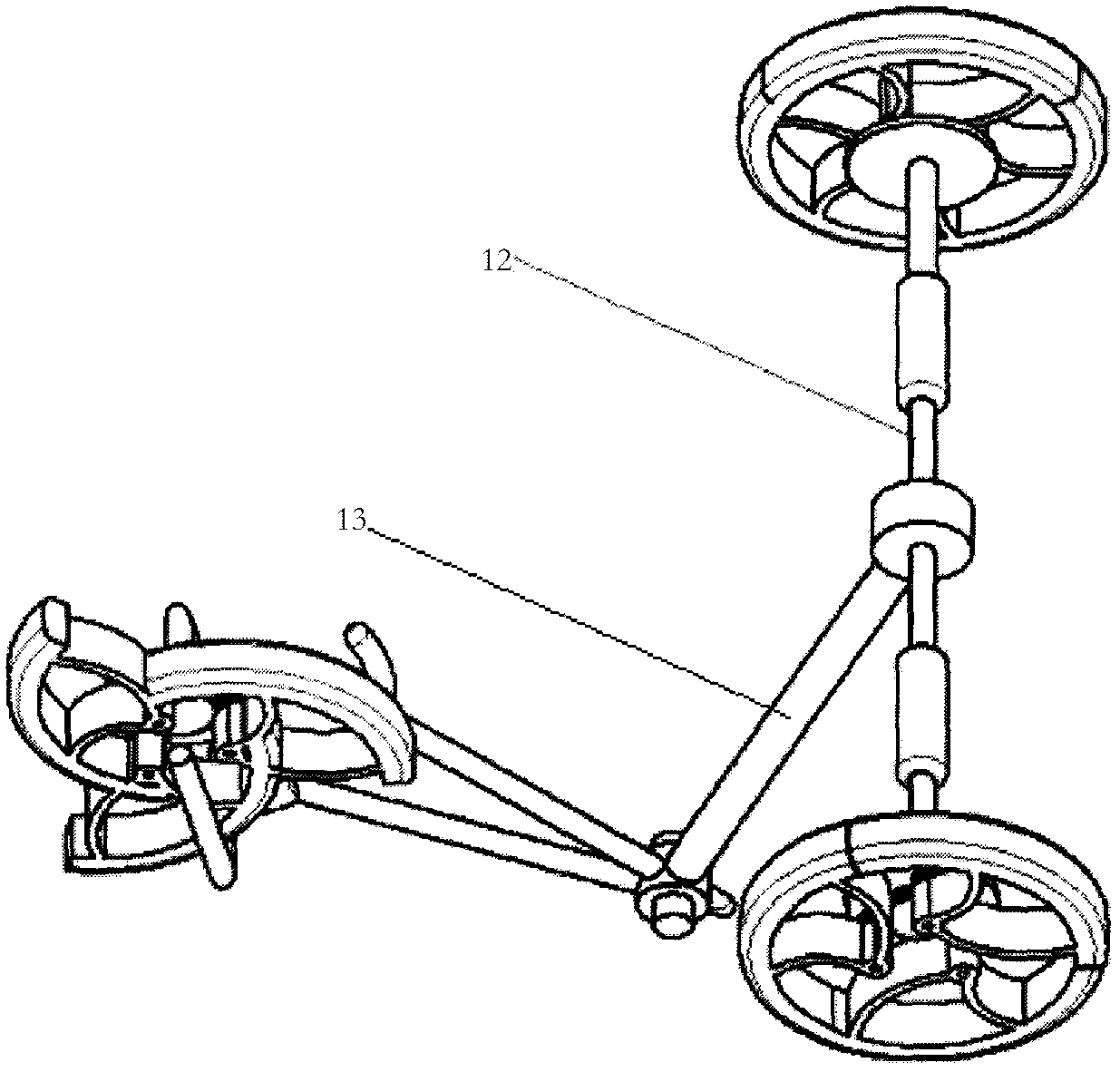
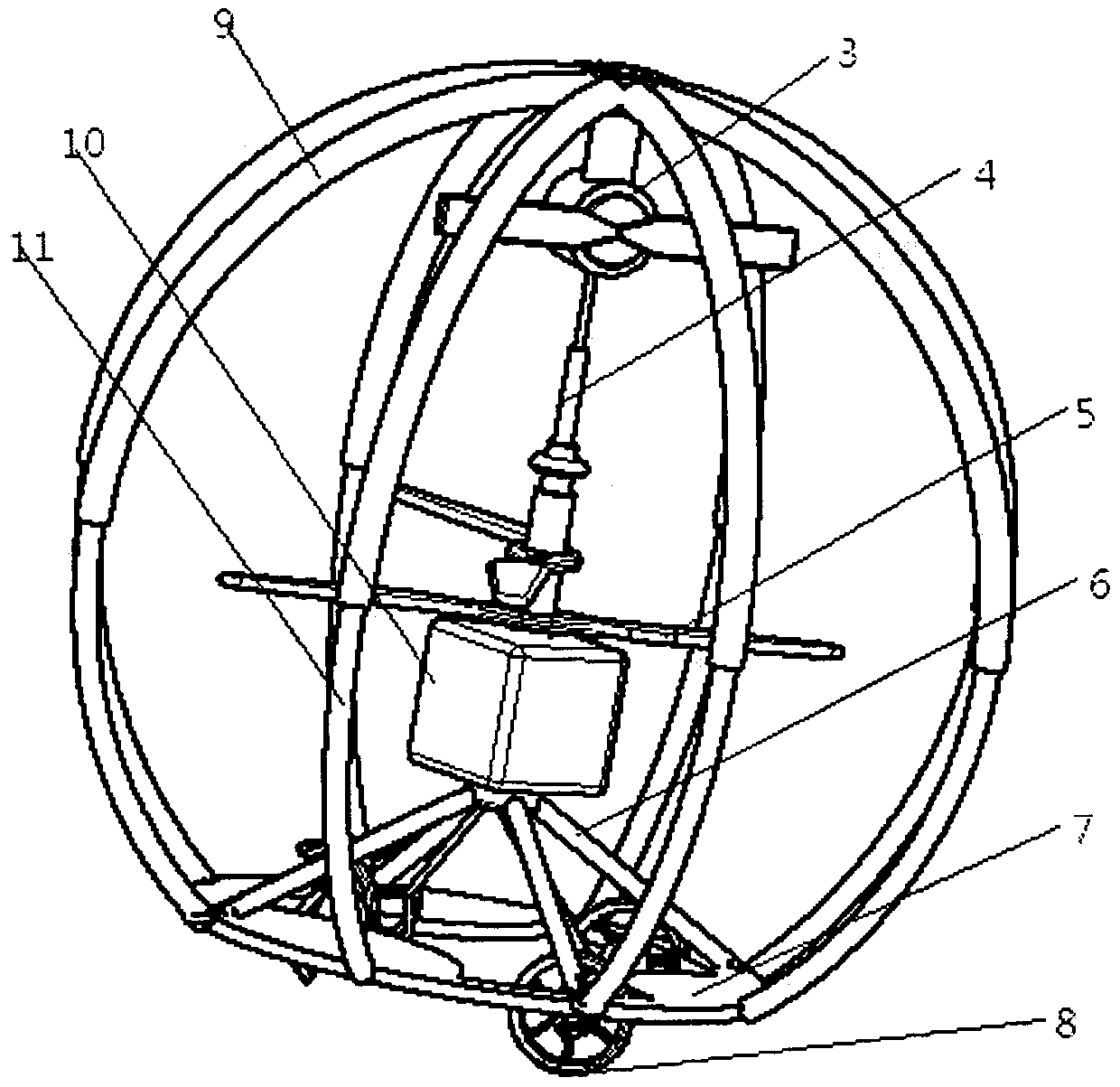
[0012] The present invention will be further described below in conjunction with the accompanying drawings. Such as figure 1 , figure 2 and image 3 Shown, a kind of deformation robot of the present invention is made up of bull gear 1, pinion 2, signal receiver 3, electric telescoping rod 4, propeller 5, support 6, chassis 7, deformable wheel 8, upper hemispherical spoke Shell 9, small-sized motor 10, lower hemispherical spoke shell 11, bearing 12, power transmission shaft 13 form, electric telescopic rod 4 bottoms are connected with propeller 5 and small-sized motor 10, top is connected with upper hemispherical spoke shell 9, small-sized motor 10 bottom Connected with the support 6 and the drive shaft 13, the deformable wheel 8 is connected with the drive shaft 13 and the small motor 10 through the bearing 12. When the robot moves accidentally against a hard wall, it is known by the impulse formula I=Ft, which is composed of plastic and rubber When the soft and elastic ou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More