Wrist-claw double-rotation manipulator
A double-rotation and manipulator technology, applied in the field of robots, can solve problems such as difficult to complete the movement requirements of the manipulator, inflexible output of the work trajectory, and lack of 360° rotation of the wrist, etc., to achieve simple structure, flexible movement, and good dynamic performance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
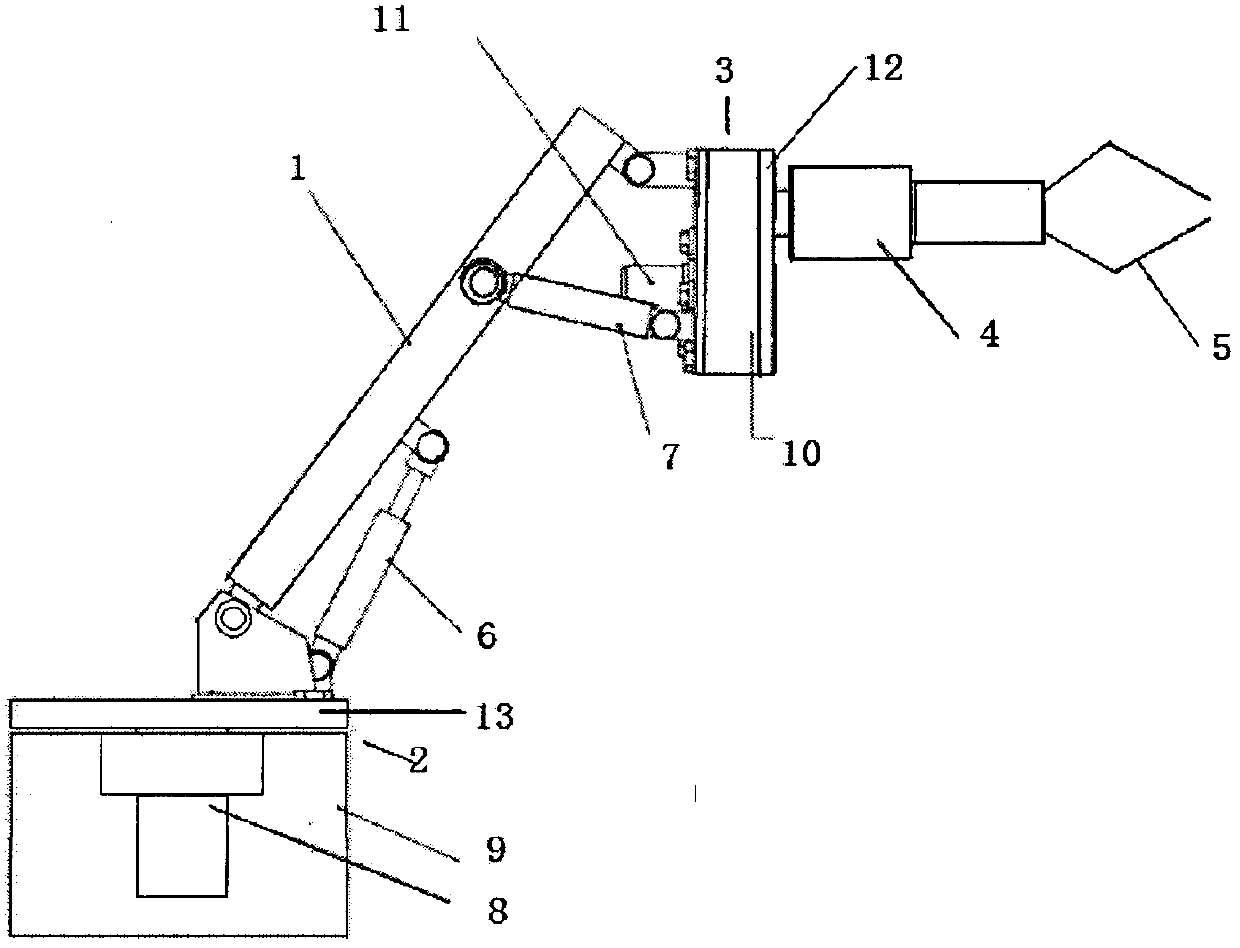
[0009] A dual-rotation manipulator with wrist claws, which is characterized in that it is composed of a horizontal rotation platform 2, a boom 1, a vertical rotation platform 3, a rotatable wrist 4 and a claw 5; wherein the horizontal rotation platform 2 includes: a base 8, a second A turntable 13 and a first motor 8. One end of the boom 1 is hinged on the horizontal rotating platform 2. The first turntable 13 is arranged on the base 9 and can rotate horizontally. The first motor 8 is connected to the first turntable 13 to drive the first The turntable 13 rotates, and a first hydraulic cylinder 6 is hinged between the boom 1 and the horizontal rotating platform 2 to drive the boom 1 to move up and down; the vertical rotating platform 3 includes a rotating seat 10, a second turntable 12, and a second motor 11 , The vertical rotating platform 3 is hinged to the other end of the boom 1, the second turntable 12 is arranged on the rotating base 10 and can rotate vertically, the secon...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap