Automatic robot navigation method based on aircraft landing gear
A technology of aircraft landing gear and automatic navigation, applied in two-dimensional position/course control, instrument, non-electric variable control, etc., to achieve the effects of high navigation positioning accuracy, reliable operation, and high autonomy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
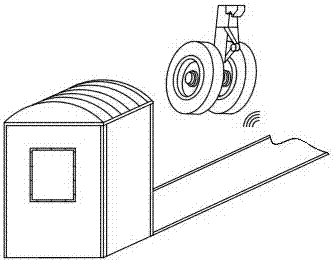
[0020] Example: such as Figure 1-2 As shown, the present invention provides a kind of robot automatic navigation method based on aircraft landing gear, comprises the steps:
[0021] 1) Monitoring and navigation: When the aircraft enters the runway, the monitoring is started; the scene video of the current runway captured by the camera system is obtained; especially the video of the two sides of the aircraft after entering the runway is to be sent to the navigation device and analyzed according to the scene video Decision-making, and by calculating the spatial position of the aircraft in the camera system and the specific distance from both sides of the runway; then time-correlated matching is performed on two consecutive frames of images of the same aircraft to generate a first-environment aircraft depth map; two images of different aircraft at the same time The frame images are spatially correlated and matched to generate a second-environment aircraft depth map; the landing ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More